filmov
tv
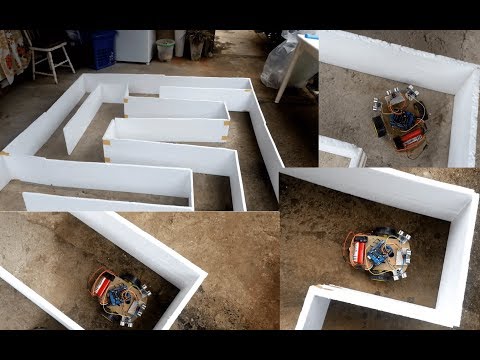
Arduino Self-driving Car using 3 HC-SR04 Ultrasonic Module

Показать описание
Self driven car using HC-SR04 and Servo motor is easy to make and it stops for sometime to check the best possible way to turn the car but if you want to continuously move and turn the car without stopping, it is little complex. We have completed this project using Arduino and HC-SR04 module which is controlling the car and turn it in the right and left if any obstacle comes in front of it without stopping. We used 3 HC-SR04 ultrasonic module, one is in front and two in the left and right of the car, which constantly check for the best possible direction if any object is in front of it and send command to Arduino to turn the car.
Also, if car does not get any space to turn (there is no any apace in front, left and right side of the car), it automatically comes in the back direction and checks for the space to turn in right or left direction.
To provide the power to self direction car, i used 11.1 v LIPO battery because it light weight. You can use 9 to 12v of any battery to provide power.
To Complete this project, below hardwares are used :
1. HC-SR04 Ultrasonic Module
2. Arduino Nano
3. L298n motor driver
4. Smart robot car chassis with 4 wheels and 4 DC Motors
5. Medium Breadboard and
6. Jumper Wires
Also, if car does not get any space to turn (there is no any apace in front, left and right side of the car), it automatically comes in the back direction and checks for the space to turn in right or left direction.
To provide the power to self direction car, i used 11.1 v LIPO battery because it light weight. You can use 9 to 12v of any battery to provide power.
To Complete this project, below hardwares are used :
1. HC-SR04 Ultrasonic Module
2. Arduino Nano
3. L298n motor driver
4. Smart robot car chassis with 4 wheels and 4 DC Motors
5. Medium Breadboard and
6. Jumper Wires
 0:14:20
0:14:20
Arduino Self-Driving Car Lesson 3: Controlling Motor Speed
 0:07:23
0:07:23
Arduino obstacle avoiding Robot car | Arduino ultrasonic sensor and L298N based self driving car
 0:01:07
0:01:07
Build a Self-Driving Arduino Car | Science Project
 0:10:37
0:10:37
Arduino Robot Car | Obstacle Avoiding Robot Car 2WD with Ultrasonic sensor and L298N Module
 0:04:42
0:04:42
Arduino Self-driving Car using 3 HC-SR04 Ultrasonic Module
 0:00:17
0:00:17
Advanced SELF Parking Car using Arduino | Parallel Parking | Internet Of Things Arduino Project
 0:01:04
0:01:04
Arduino Self-Driving Car Lesson Introduction
 0:12:32
0:12:32
Arduino Uno R3: Digitalwrite your First Robot Car
 0:04:43
0:04:43
wAll-E 👾 The 4 in 1 robo car || CSPIT CSE CHARUSAT || #arduino #technology #project #car #science
 0:16:23
0:16:23
Arduino Self-Driving Car Lesson 2: Steering with Two Motors
 0:01:10
0:01:10
Arduino Self Driving Car with Ultrasonic and Lidar Sensor
 0:01:45
0:01:45
Autonomous Arduino Car Maze Solving with 3 Ultrasonic Sensors
 0:00:15
0:00:15
Autonomous Car with Arduino . Full video on my channel #arduino #viral #scienceproject #oppenheimer
 0:01:16
0:01:16
DIY Arduino Self-Driving Car
 0:24:10
0:24:10
Arduino Self-Driving Car Lesson 1: Controlling a Motor
 0:00:16
0:00:16
Obstacle Avoiding Car using Ultrasonic sensor | Path Finder Robot
 0:06:36
0:06:36
(Part 3): This is how I created a self driving vehicle using Ai and Python
 0:00:15
0:00:15
Arduino autonomous driving - MINI ver. produced by SMrTv
 0:13:10
0:13:10
Arduino obstacle avoiding + voice control + Bluetooth control Robot | DIY Arduino Robot
 0:00:59
0:00:59
Tesla Full Self-Driving for 20 minutes straight
 0:03:06
0:03:06
Self driving Arduino car - HC-SR104 sensors
 0:00:23
0:00:23
⚠️*TRUSTS TESLA AUTOPILOT* ⚠️ IMMEDIATE REGRET 😳🛑 ALMOST CRASHES ⚠️ WOULD YOU TRUST THIS⁉️ #Shorts...
 0:00:57
0:00:57
Closer View of the Self Driving Car : Raspberry PI 3, Arduino, RPI Camera
 0:05:29
0:05:29
Arduino Powered Self Driving Car
Комментарии