filmov
tv
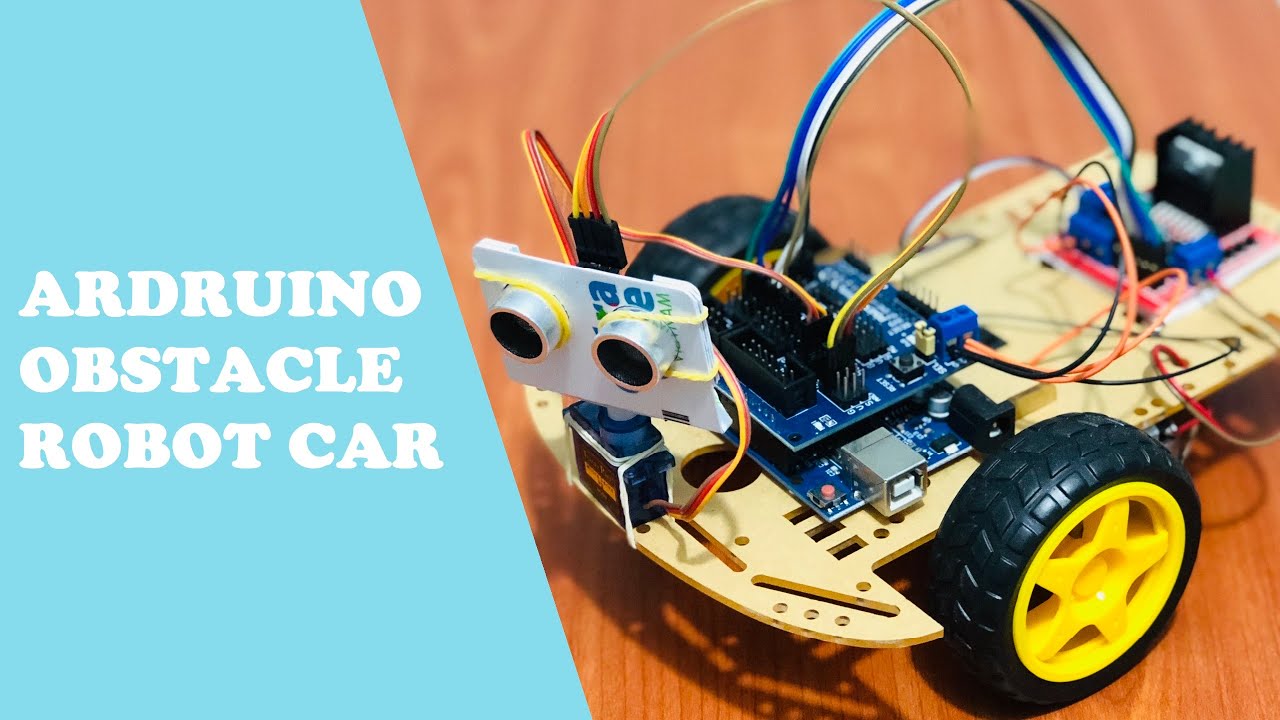
Arduino Robot Car | Obstacle Avoiding Robot Car 2WD with Ultrasonic sensor and L298N Module
Показать описание
#arduino_car, #arduino_robot, #obstacle_avoiding_robot
- Arduino Obstacle Avoiding Robot Car 2WD Kit:
1 x Car chassis
2 x Car Wheels
2 x DC Gear Motor
2 x 20 line code disk
4 x Fasteners (high intensity black acrylic)
1 x Caster
1 x Four battery box
1 x Quality Rocker Switch
1 x V5 shield
1 x UNO R3
1 x SG90
1 x FPV
1 x L298N
- Wiring diagram and Arduino Sketch:
- Music:
JJD - Sugar High Listen to the track here -
ALWAYS WITH YOU – COLBREAKZ & LOXIVE Listen to it on Spotify here:
APHRODITE – NEPTUNICA
- Arduino Obstacle Avoiding Robot Car 2WD Kit:
1 x Car chassis
2 x Car Wheels
2 x DC Gear Motor
2 x 20 line code disk
4 x Fasteners (high intensity black acrylic)
1 x Caster
1 x Four battery box
1 x Quality Rocker Switch
1 x V5 shield
1 x UNO R3
1 x SG90
1 x FPV
1 x L298N
- Wiring diagram and Arduino Sketch:
- Music:
JJD - Sugar High Listen to the track here -
ALWAYS WITH YOU – COLBREAKZ & LOXIVE Listen to it on Spotify here:
APHRODITE – NEPTUNICA
 0:06:45
0:06:45
How to make Arduino Obstacle Avoiding Robot Car | Under $20
 0:10:37
0:10:37
Arduino Robot Car | Obstacle Avoiding Robot Car 2WD with Ultrasonic sensor and L298N Module
 0:07:23
0:07:23
Arduino obstacle avoiding Robot car | Arduino ultrasonic sensor and L298N based self driving car
 0:10:40
0:10:40
Obstacle Avoiding Robot Car Using An Arduino
 0:06:17
0:06:17
Arduino Obstacle Avoiding Robot Car | DIY
 0:00:31
0:00:31
Multi-Obstacle-Avoiding Robot Using Arduino
 0:08:13
0:08:13
OSOYOO Robot Car Kit V2.0 for Arduino lesson 5: Obstacle Avoidance Robot Car
 0:00:25
0:00:25
Obstacle Avoiding Robot using Arduino and Ultrasonic Sensor
 0:01:17
0:01:17
Arduino 4WD Smart Robot Car
 0:09:29
0:09:29
Elegoo Uno R3 Smart Robot Car Kit V 3.0 - FULL REVIEW - Arduino Kit | Max Imagination
 0:06:44
0:06:44
Intelligent Obstacle Avoiding Robot || Step by Step Tutorial || Arduino Project
 0:00:14
0:00:14
Arduino Bluetooth Controlled Robot Car | Arduino Obstacle Avoidance Robot Car | Arduino 4WD Car KIT
 0:16:18
0:16:18
Arduino Obstacle Avoiding Robot Car 4WD
 0:06:09
0:06:09
How To Make A DIY Arduino Obstacle Avoiding Car At Home
 0:06:29
0:06:29
#Tutorial: Obstacle Avoidance Robot using Arduino and IR sensors
 0:10:35
0:10:35
How to make a 4WD OBSTACLE AVOIDING CAR | OBSTACLE AVOIDING CAR with L293D motor driver shield
 0:26:07
0:26:07
ESP32 All In One Smart Arduino Car 4WD Mecanum Wheel | Acebott Smart Car | Camera WiFi Programming
 0:09:14
0:09:14
Arduino Obstacle Avoiding Robot Car 2WD With AA Battery
 0:00:15
0:00:15
Arduino robot car.🤖🚘 Automatic car.🔥🔥🔥 #robot #robotcar #arduino #arduino_project #car...
 0:16:32
0:16:32
Advanced Mecanum Wheels Robot using Arduino & ESP32 CAM || 4WD Omnidirectional Movement
 0:13:10
0:13:10
Arduino obstacle avoiding + voice control + Bluetooth control Robot | DIY Arduino Robot
 0:00:40
0:00:40
Robotics kit for beginners | Minibot Robot | Best Arduino robot car
 0:08:29
0:08:29
Arduino All-in-One Robot
 0:00:16
0:00:16
Arduino obstacle avoiding robot car.
Комментарии