filmov
tv
Step by step Guide: A* algorithm | A star for 2D Path Planning

Показать описание
This video covers a step by step guide for explaining how the A* algorithm work, for path planning in a 2D grid map. In the following videos, I will cover D*, LPA*, D*-Lite, RRT, RRT*.
▬ Contents of this video ▬
0:00 Intro
0:22 General concepts of A*
1:50 A* initialization step
2:24 Iteration 1
3:49 Iteration 2
5:37 Iteration 3
7:17 Iteration 4
9:20 the last Iteration 5
10:14 get the path
11:10 compare with Dijkstra's
▬ Contents of this video ▬
0:00 Intro
0:22 General concepts of A*
1:50 A* initialization step
2:24 Iteration 1
3:49 Iteration 2
5:37 Iteration 3
7:17 Iteration 4
9:20 the last Iteration 5
10:14 get the path
11:10 compare with Dijkstra's
 0:00:43
0:00:43
Scribe auto-generates step-by-step guides in seconds! ✨
 0:10:27
0:10:27
This App Makes Step-by-Step Guides in Minutes!
 1:19:44
1:19:44
💪 Systematic Literature Review Made EASY: A Step-by-Step Guide
 0:19:23
0:19:23
Literature Review - Step by Step Guide For Graduate Students | Prof. David Stuckler
 0:10:57
0:10:57
From Rubik’s Cube to Code: A Step-by-Step Guide to TDD Skill Mastery
 1:00:51
1:00:51
A Step By Step Guide for APA Style Student Papers
 0:24:15
0:24:15
How To Start a Business - Step by Step Guide for Beginners
 0:03:32
0:03:32
Step-by-Step Guide to Wrap Your Hands | Boxing Basics for Beginners
 0:23:44
0:23:44
LITERATURE REVIEW: Step by Step Guide for Writing an Effective Literature Review
 0:09:53
0:09:53
How to self study pure math - a step-by-step guide
 0:07:00
0:07:00
WWL Surgical Scrub and Gowning -A Step by Step Guide
 0:18:03
0:18:03
How to Outline and Write a Research Paper: A Step-by-Step Guide
 1:05:01
1:05:01
How To Build A PC - Step by Step (Full Build Guide)
 0:15:14
0:15:14
Basic Mens Haircut | Step by Step Guide
 0:04:21
0:04:21
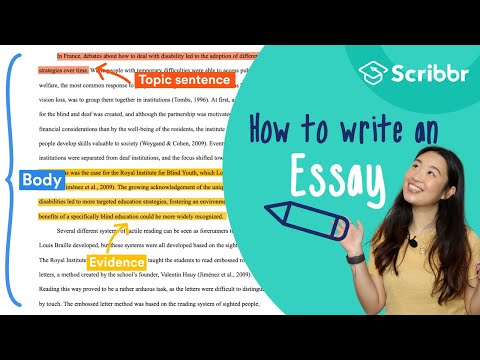
How to Write an Essay: 4 Minute Step-by-step Guide | Scribbr 🎓
 0:09:15
0:09:15
My Step by Step Guide to Writing a Research Paper
 0:21:22
0:21:22
Step-by-Step Guide: Constructing the Egyptian Pyramids (In-Depth Exploration)
 0:42:08
0:42:08
Parkour for Beginners | In Depth Step-by-Step Guide
 1:23:31
1:23:31
System Design Interview – Step By Step Guide
 0:06:53
0:06:53
Most Effective Massage Techniques Step by Step Sequence
 0:03:05
0:03:05
How to Write a Literature Review: 3 Minute Step-by-step Guide | Scribbr 🎓
 0:07:38
0:07:38
How To Become A Hacker In 2024 | Step By Step Guide For Beginners
 0:14:42
0:14:42
The Secret step-by-step Guide to learn Hacking
 0:08:39
0:08:39
ALL OF TERRARIA IN 8 MINS! Terraria Progression Guide! Step by Step Guide for Beginners 2020!
Комментарии