filmov
tv
Autonomous A.I. Robot Navigation Setup & Demo

Показать описание
It's part 2 of my Really Useful Robot project. This time we're setting up ROS on the robot so it can map and navigate it's environment using the laser scanner. I'm using the ROS navigation stack, but this is dependent on having the Odometry set up properly which is where the main focus of this video is. Hardware includes an NVIDIA Jetson Xavier NX, RP Lidar A2, ODrive 3.6 + brushless motors and 8192 CPR encoders, Teensy 4.1. With thanks to:
You can support me on Patreon or buy my Merchandise:
***************************
***************************
Affiliate links - I will get some money of you use them to sign up or buy something:
***************************
***************************
Other socials:
***************************
***************************
Huge thanks to my Patrons, without whom my standard of living would drastically decline. Like, inside out-Farm Foods bag decline. Plus a very special shoutout to Lulzbot, Inc who keep me in LulzBot 3D printers and support me via Patreon.
HARDWARE/SOFTWARE
Below you can also find a lot of the typical tools, equipment and supplies used in my projects:
XROBOTS
Former toy designer, current YouTube maker and general robotics, electrical and mechanical engineer, I’m a fan of doing it yourself and innovation by trial and error. My channel is where I share some of my useful and not-so-useful inventions, designs and maker advice. Iron Man is my go-to cosplay, and 3D printing can solve most issues - broken bolts, missing parts, world hunger, you name it.
XRobots is the community around my content where you can get in touch, share tips and advice, and more build FAQs, schematics and designs are also available.
 0:27:05
0:27:05
Autonomous A.I. Robot Navigation Setup & Demo
 0:00:36
0:00:36
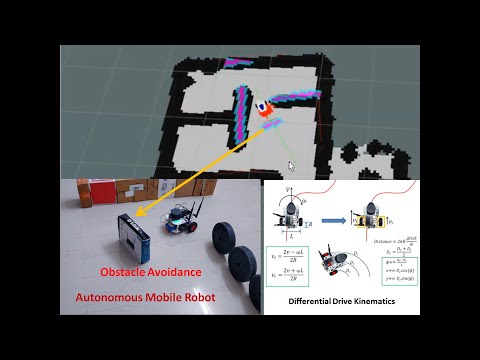
demo of autonomous navigation mobile robot
 0:13:26
0:13:26
Autonomous Navigation Mobile Robot using ROS | Jetson Nano | RPLidar | Differential Drive Kinematics
 0:01:48
0:01:48
Autonomous Mobile Robot Navigation With ROS (Jetson Nano + Arduino + Lidar + Extended Kalman Filter)
 0:04:35
0:04:35
ROS Simulation Of MIR Robots (Autonomous Navigation)
 0:10:05
0:10:05
Autonomous Navigation Mobile Robot Version 2 | ROS | Odrive | BLDC Motors| Jetson Nano | RPLidar
 0:01:07
0:01:07
Autonomous robot navigation
 0:29:26
0:29:26
Nav 2 in ROS 2 for autonomous Navigation using SLAM for Indoor Mobile Robots
 1:18:37
1:18:37
Star Talk Live | Motion Planning among Decision-Making Agents
 0:00:16
0:00:16
Autonomous Navigation Robot
 0:01:59
0:01:59
Customer Case: An autonomous navigation robot from the Safe AI Lab of Carnegie Mellon University
 0:08:01
0:08:01
How to Build an Autonomous Robot Using LiDAR
 0:10:46
0:10:46
Autonomous Rover From Scratch (ROS) Part 1
 0:00:21
0:00:21
ROS Autonomous Navigation stack on RC car
 0:03:34
0:03:34
Introducing OutdoorNav Autonomy Software | GPS-based Autonomous Navigation for Offroad Vehicles
 0:00:06
0:00:06
Autonomous navigation using LIDAR + ROS
 0:11:30
0:11:30
What Is Autonomous Navigation? | Autonomous Navigation, Part 1
 0:12:00
0:12:00
Autonomous Navigation for 4 Wheeled Mobile robot using ROS | Code available in description
 0:06:16
0:06:16
Understanding Autonomous Navigation in ROS2: Mapping, Planning, and Execution
 0:09:47
0:09:47
Autonomous Navigation with Deep Reinforcement Learning Using ROS2
 0:00:39
0:00:39
Tesla Robot Driving a Cybertruck for Uber
 0:03:09
0:03:09
Autonomous Robot Navigation Based on Multi-Camera Perception
 0:42:41
0:42:41
Autonomous Navigation Mobile Robot Using ROS Without Using a Pre-saved Map | ROS 101 | Lesson 10
 0:23:36
0:23:36
IWSP Project - Internet of Things (IoT) Solution for Autonomous Robot Navigation
Комментарии