filmov
tv
Rotation Matrix (Part 2) | Coordinate Transformations | Robotics 201

Показать описание
We discuss what happens when there are successive rotations about different axes. Also, I explain visually what it means when an object undergoes multiple rotations.
🌟 Contents 🌟
00:00 Recap
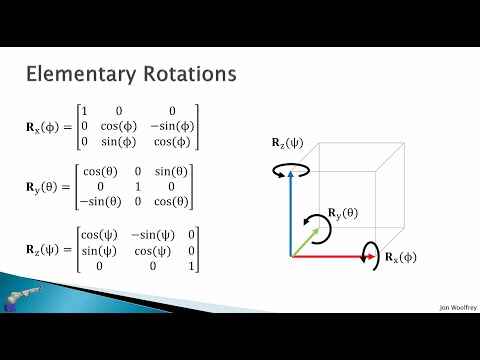
00:20 Successive Rotations
02:32 Understanding rotations visually
07:07 Forward Kinematics of robotic wrist
In the next couple of videos, we will deal with what happens when we have both a rotation and a translation. And more importantly, how is this applicable to real robots!
------
This video is part of the Robotics 201 tutorial series which covers kinematics and modeling of 3D robots.
This tutorial lesson series starts out from the very basics of robotics (assuming no prior knowledge) and gradually builds on in bite-sized videos of 10 minutes or less. By following along, you will soon become extremely good in the kinematics and modeling aspects of robots. And these will help you to design and build robots.
Here's what we will cover in this video series:
1. Co-ordinate Transformation for 3D robots
2. Homogeneous Transformations for 3D robots
3. Forward Kinematics
4. Inverse Kinematics
5. Robotic wrists (end-effector)
6. End-effector Velocities and Jacobians
7. Singularities of robots
8. Gimbal Locks
9. Forces & Torques
I will be uploading 1 video per week. If you find these helpful, don't forget to share and subscribe!
_____________________________
Robotics 201 - Robotics full course for beginners - Kinematics and Modeling
#roboticsforbeginners #roboticsTutorials #robotics #learnrobotics#homogenoustransformationmatrices #configuration #rotationmatrix #mechatronics #orientation #orientationinrobotics #transformationmatrices #displacementinrobotics #poseinrobotics #pose #translationandrotation
🌟 Contents 🌟
00:00 Recap
00:20 Successive Rotations
02:32 Understanding rotations visually
07:07 Forward Kinematics of robotic wrist
In the next couple of videos, we will deal with what happens when we have both a rotation and a translation. And more importantly, how is this applicable to real robots!
------
This video is part of the Robotics 201 tutorial series which covers kinematics and modeling of 3D robots.
This tutorial lesson series starts out from the very basics of robotics (assuming no prior knowledge) and gradually builds on in bite-sized videos of 10 minutes or less. By following along, you will soon become extremely good in the kinematics and modeling aspects of robots. And these will help you to design and build robots.
Here's what we will cover in this video series:
1. Co-ordinate Transformation for 3D robots
2. Homogeneous Transformations for 3D robots
3. Forward Kinematics
4. Inverse Kinematics
5. Robotic wrists (end-effector)
6. End-effector Velocities and Jacobians
7. Singularities of robots
8. Gimbal Locks
9. Forces & Torques
I will be uploading 1 video per week. If you find these helpful, don't forget to share and subscribe!
_____________________________
Robotics 201 - Robotics full course for beginners - Kinematics and Modeling
#roboticsforbeginners #roboticsTutorials #robotics #learnrobotics#homogenoustransformationmatrices #configuration #rotationmatrix #mechatronics #orientation #orientationinrobotics #transformationmatrices #displacementinrobotics #poseinrobotics #pose #translationandrotation
 0:08:58
0:08:58
Rotation Matrix (Part 2) | Coordinate Transformations | Robotics 201
 0:04:14
0:04:14
Modern Robotics, Chapter 3.2.1: Rotation Matrices (Part 2 of 2)
 0:39:13
0:39:13
Robotics 1: Rotation/Orientation Matrix Part 2
 0:23:08
0:23:08
AEE462 Lecture 7, Part B - A Review of Rotation Matrices and Conversion between Coordinate Systems
 0:09:30
0:09:30
ROCO224 B2 Rotation Matrices Part2
 0:02:54
0:02:54
Modern Robotics, Chapter 3.2.1: Rotation Matrices (Part 1 of 2)
 0:14:27
0:14:27
Transformation Matrices Part 2
 0:07:42
0:07:42
Robotic Rotation Matrix Numerical Problem Part 2
 0:12:02
0:12:02
Program a beautiful clock in C in no Time - Part 2
 0:11:22
0:11:22
Understanding the Rotation Matrix
 0:17:01
0:17:01
Robotics 1 Unit 1 (Kinematics) Module 3 (Rotation Matrices) Part 2 (Rotation Matrices in Python)
 0:10:17
0:10:17
Linear Transformations and Matrices (Part 2: Rotation)
 0:24:25
0:24:25
Rotation Matrix Time Derivative
 0:11:45
0:11:45
2.2 Rotation Matrices
 0:03:43
0:03:43
Modern Robotics, Chapter 3.2.3: Exponential Coordinates of Rotation (Part 2 of 2)
 0:08:49
0:08:49
Rotation Matrix | Coordinate Transformations | Robotics 201
 0:11:14
0:11:14
2.3 Rotations in 3D
 0:11:03
0:11:03
ECE 761.02 Rotation Matrices
 0:03:13
0:03:13
Robotics: Transformation Matrices - Part 2
 0:15:55
0:15:55
Diagonalizing a 2D rotation matrix [TRICKY!] - Part 2: Eigenvectors 【CHILL LO FI VERSION】...
 0:22:35
0:22:35
Rotation Matrix for 2D Vectors
 0:51:14
0:51:14
Homogeneous Transformations for Robotics - Part 2 / Composition and Parameterization of Rotations
 0:16:41
0:16:41
Robotics 2 U1 (Kinematics) S3 (Jacobian Matrix) P2 (Finding the Jacobian)
 0:05:05
0:05:05
Rotation matrix derivation (step-by-step prove)
Комментарии