filmov
tv
Control System Introduction

Показать описание
 0:10:44
0:10:44
Introduction to Control System
 0:09:44
0:09:44
Introduction to Control Systems
 0:01:03
0:01:03
Introduction to Control Systems
 0:06:29
0:06:29
Understanding Control System
 0:16:08
0:16:08
Everything You Need to Know About Control Theory
 0:07:44
0:07:44
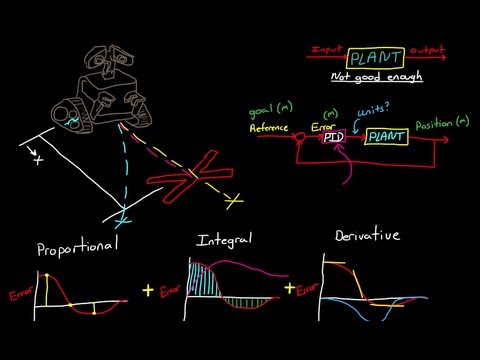
PID Control - A brief introduction
 0:05:50
0:05:50
Why Learn Control Theory
 0:04:17
0:04:17
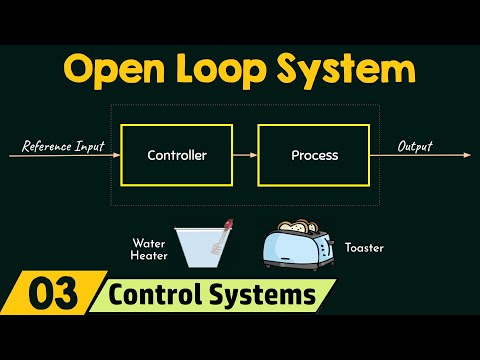
Open Loop Systems
 1:32:55
1:32:55
Introduction to Superconducting Quantum Computers (Yap Yung Szen, Ph.D.)
 0:05:56
0:05:56
Control System Engineering - Part 1 - Introduction
 0:06:59
0:06:59
Control System Introduction
 0:12:17
0:12:17
Introduction to Control Systems | Control Systems 1.1
 0:14:05
0:14:05
Introduction to Control System Components - Control System Components - Control System
 0:15:13
0:15:13
What is Control System - Introduction of Control Systems - Control System
 2:57:23
2:57:23
Control Systems | Introduction
 0:12:45
0:12:45
Control System Lectures - Bode Plots, Introduction
 0:26:58
0:26:58
A real control system - how to start designing
 0:19:32
0:19:32
Open and Closed Loop Control Systems - Introduction of Control Systems - Control System
 0:08:29
0:08:29
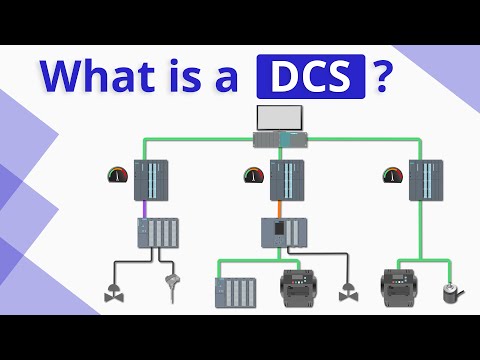
What is DCS? (Distributed Control System)
 0:29:38
0:29:38
Control Systems , Introduction to Control System | AKTU Digital Education
 0:29:35
0:29:35
Control System II - Introduction & Basic Concepts of Control System
 1:06:31
1:06:31
Feedback and Control Systems Episode 1: Introduction to Control Systems
 0:06:05
0:06:05
Introduction to Transfer Function
 0:11:33
0:11:33
Introduction to System Stability and Control
Комментарии