filmov
tv
Reading a Rotary Encoder Using an Arduino (using Interrupt) - Part 2/2

Показать описание
In this tutorial I will be showing you how to read an encoder using your Arduino board using Interrupts.
I have used 4X encoding principle to increase the resolution four times.
The link to the first part of this tutorial:
The link to the Arduino official page to read more about Interrupts:
I have used 4X encoding principle to increase the resolution four times.
The link to the first part of this tutorial:
The link to the Arduino official page to read more about Interrupts:
 0:04:55
0:04:55
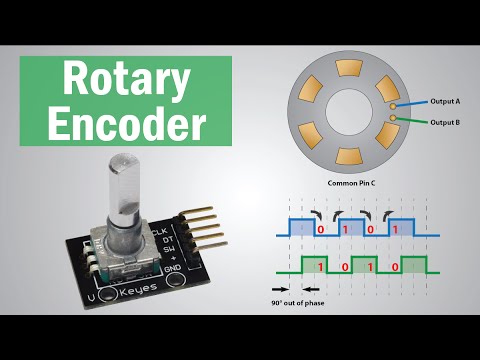
How Rotary Encoder Works and How To Use It with Arduino
 0:09:20
0:09:20
Reading a Rotary Encoder Using an Arduino (using Interrupt) - Part 1/2
 0:32:10
0:32:10
Using Rotary Encoders with Arduino
 0:14:12
0:14:12
How to use rotary encoders
 0:00:15
0:00:15
Stepper Motor Accel Library Rotary Encoder Control with Arduino
 0:21:11
0:21:11
How to use a Rotary Encoder with an Arduino - CODE EXPLAINED!
 0:00:10
0:00:10
Using Rotary Encoder with Arduino | TM1637 LCD Display
 0:00:18
0:00:18
Using encoder to measure RPM in STM32F4
 0:15:53
0:15:53
Hacking the I2C protocol by hand with the AS5600 magnetic rotary encoder
 0:02:01
0:02:01
Rotary Encoder Incremental rotary Encoder How to use it with Arduino
 0:20:44
0:20:44
How to use encoders (Optical, Hall Effect, Quadrature)
 0:00:37
0:00:37
Reading Absolute Encoder with Arduino
 0:09:59
0:09:59
How To Use A Rotary Encoder With Raspberry Pi Pico
 0:01:17
0:01:17
Incremental Encoder (Shaft Encoder)- how it works
 0:11:37
0:11:37
Understanding and using quadrature encoders - The Byte Sized Engineer | DigiKey
 0:14:44
0:14:44
How to use Rotary Encoder with Arduino
 0:12:05
0:12:05
Adventures in Science: How to Use Rotary Encoders
 0:08:14
0:08:14
Synchronizing Motor Position with Encoders, PID Control and Arduino
 0:03:46
0:03:46
How to read rotary encoder using MATLAB-Arduino | Simulink | Part 1
 0:13:12
0:13:12
ROTARY ENCODER WITH INTERRUPTS - Arduino tutorial #12
 0:09:30
0:09:30
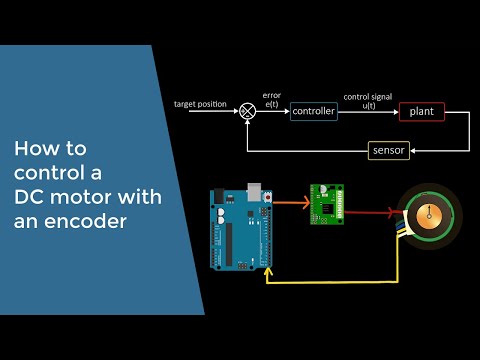
How to control a DC motor with an encoder
 0:07:21
0:07:21
ROTARY ENCODER with Arduino nano | How to use ROTARY ENCODER using LED [Code & Circuit Diagram]
 0:03:17
0:03:17
Rotary Encoder Craziness
 0:01:10
0:01:10
Reading a rotary encoder with a Yocto-Knob
Комментарии