filmov
tv
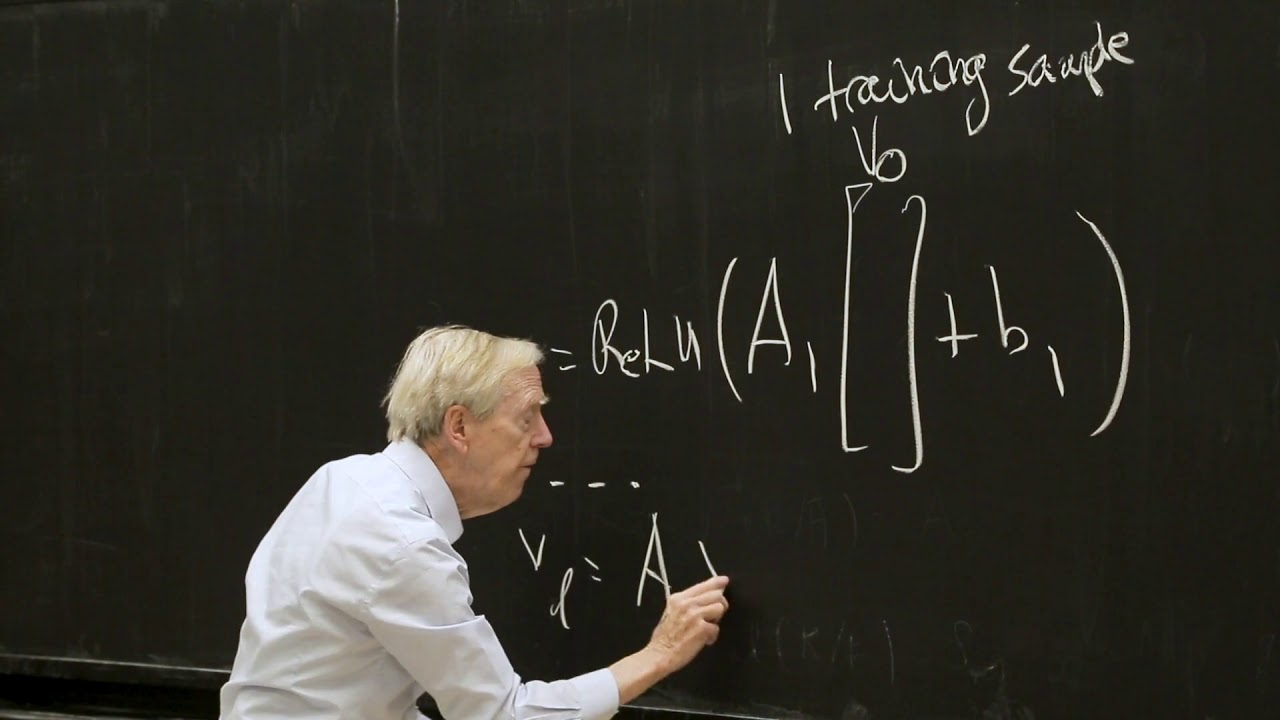
33. Neural Nets and the Learning Function
Показать описание
MIT 18.065 Matrix Methods in Data Analysis, Signal Processing, and Machine Learning, Spring 2018
Instructor: Gilbert Strang
This lecture focuses on the construction of the learning function F, which is optimized by stochastic gradient descent and applied to the training data to minimize the loss. Professor Strang also begins his review of distance matrices.
License: Creative Commons BY-NC-SA
Instructor: Gilbert Strang
This lecture focuses on the construction of the learning function F, which is optimized by stochastic gradient descent and applied to the training data to minimize the loss. Professor Strang also begins his review of distance matrices.
License: Creative Commons BY-NC-SA
 0:56:07
0:56:07
33. Neural Nets and the Learning Function
 0:05:45
0:05:45
Neural Network In 5 Minutes | What Is A Neural Network? | How Neural Networks Work | Simplilearn
 0:04:32
0:04:32
Neural Networks Explained in 5 minutes
 0:18:40
0:18:40
But what is a neural network? | Chapter 1, Deep learning
 0:05:39
0:05:39
ANN vs CNN vs RNN | Difference Between ANN CNN and RNN | Types of Neural Networks Explained
 0:16:00
0:16:00
What is Recurrent Neural Network (RNN)? Deep Learning Tutorial 33 (Tensorflow, Keras & Python)
 0:18:51
0:18:51
Equivariant Neural Networks | Part 1/3 - Introduction
 0:09:09
0:09:09
Neural Network Architectures & Deep Learning
 0:14:28
0:14:28
Graph Neural Networks - a perspective from the ground up
 0:13:52
0:13:52
The Neural Network, A Visual Introduction
 0:25:28
0:25:28
Dendrites: Why Biological Neurons Are Deep Neural Networks
 0:12:23
0:12:23
Neural Networks and Deep Learning: Crash Course AI #3
 5:00:53
5:00:53
The Complete Mathematics of Neural Networks and Deep Learning
 0:17:34
0:17:34
Neural Networks Pt. 2: Backpropagation Main Ideas
 0:08:09
0:08:09
1. Introduction to Artificial Neural Network | How ANN Works | Soft Computing | Machine Learning
 0:01:00
0:01:00
Why Transformer over Recurrent Neural Networks
 0:20:33
0:20:33
Gradient descent, how neural networks learn | Chapter 2, Deep learning
 0:09:04
0:09:04
The Convolutional Neural Network (Animated Introduction)
 0:11:15
0:11:15
Neural Networks - Introduction to the Maths Behind
 0:19:36
0:19:36
T33.2: A Neural Network Model of Continual Learning with Cognitive Control
 0:34:32
0:34:32
Physics Informed Neural Networks (PINNs) [Physics Informed Machine Learning]
 0:31:51
0:31:51
MAMBA from Scratch: Neural Nets Better and Faster than Transformers
 0:02:30
0:02:30
NeuralNet Package - Neural Networks for Business Analytics with R (Rstudio) 25/33
 0:22:21
0:22:21
Recurrent Neural Networks | RNN LSTM Tutorial | Why use RNN | On Whiteboard | Compare ANN, CNN, RNN
Комментарии