filmov
tv
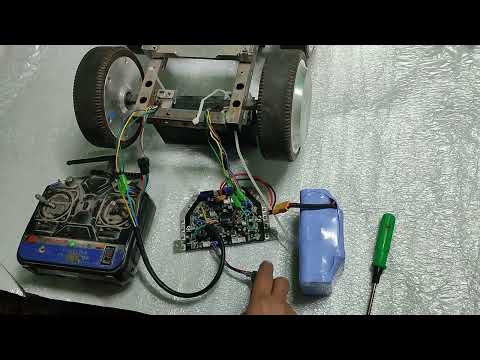
Inexpensive Hoverboard Motor Controller

Показать описание
Here is a quick video on how to use the new version of the RioRand brushless DC motor controller. I show some of the differences between this new version and the old version. I also connect a logic analyzer to measure some of the signals coming off the board. Check it out.
For more information on this board check out my blog post here:
For the speed calculations formulas go here:
As an Amazon Associate, I earn from qualifying purchases.
Production equipment
For more information on this board check out my blog post here:
For the speed calculations formulas go here:
As an Amazon Associate, I earn from qualifying purchases.
Production equipment
 0:09:46
0:09:46
Inexpensive Hoverboard Motor Controller
 0:00:29
0:00:29
rc, arduino controlled cheap hall-less bldc controller and scooter hub motor wheel
 0:10:52
0:10:52
Running a Hoverboard Motor with a MotorController using and Arduino Uno Part 1.
 0:13:44
0:13:44
Building a very cheap e bike with hoverboard motor - easy conversion
 0:08:46
0:08:46
Hoverboard motor control with ZS-X11H Robots Automation 400W Brush less motor controller Demo bldc 7
 0:11:29
0:11:29
RioRand 400W Brushless Motor Controller Demo
 0:13:54
0:13:54
HOVER BOARD MOTOR HACK / BALANCE BOARD
 0:08:09
0:08:09
FLIPSKY VESC + HOVERBOARD MOTORS + ARDUINO - RC BALANCE BOARD CAR
 0:01:21
0:01:21
Two hoverboard motors runs on one brushless controller.
 0:03:27
0:03:27
Simple tests of driving a hoverboard motor with a cheap brushless motor controller
 0:04:01
0:04:01
Hacking a Hoverboard
 0:00:39
0:00:39
Control the hoverboard BLDC motor with joystick on ODrive
 0:00:25
0:00:25
Hoverboards are trash 🤮 try hovershoes instead of a hoverboard
 0:00:20
0:00:20
Hoverboard motor test power for EV conversion
 0:02:09
0:02:09
Hoverboard bldc motor test on controller 48v
 0:00:28
0:00:28
Diy electric scooter
 0:02:37
0:02:37
manual #hoverboard #rc
 0:06:23
0:06:23
A Cheap 350w BLDC Board with Regenerative Braking
 0:00:54
0:00:54
5 CHEAP Electric Scooters! 🛴
 0:00:16
0:00:16
Hoverboard motors and battery packs
 0:18:25
0:18:25
HOVERBOARD MOBILITY SCOOTER - Part 1 - Build and Test - bobby car firmware
 0:00:37
0:00:37
Controlling hoverboard motors with a cheap pwm controller off eBay/amazon. #hoverboardmotors #pwm
 0:00:59
0:00:59
Omnidirectional Hoverboard Motor Mecanum Wheel
 0:01:00
0:01:00
Repurposing Hoverboard Brushless Motors
Комментарии