filmov
tv
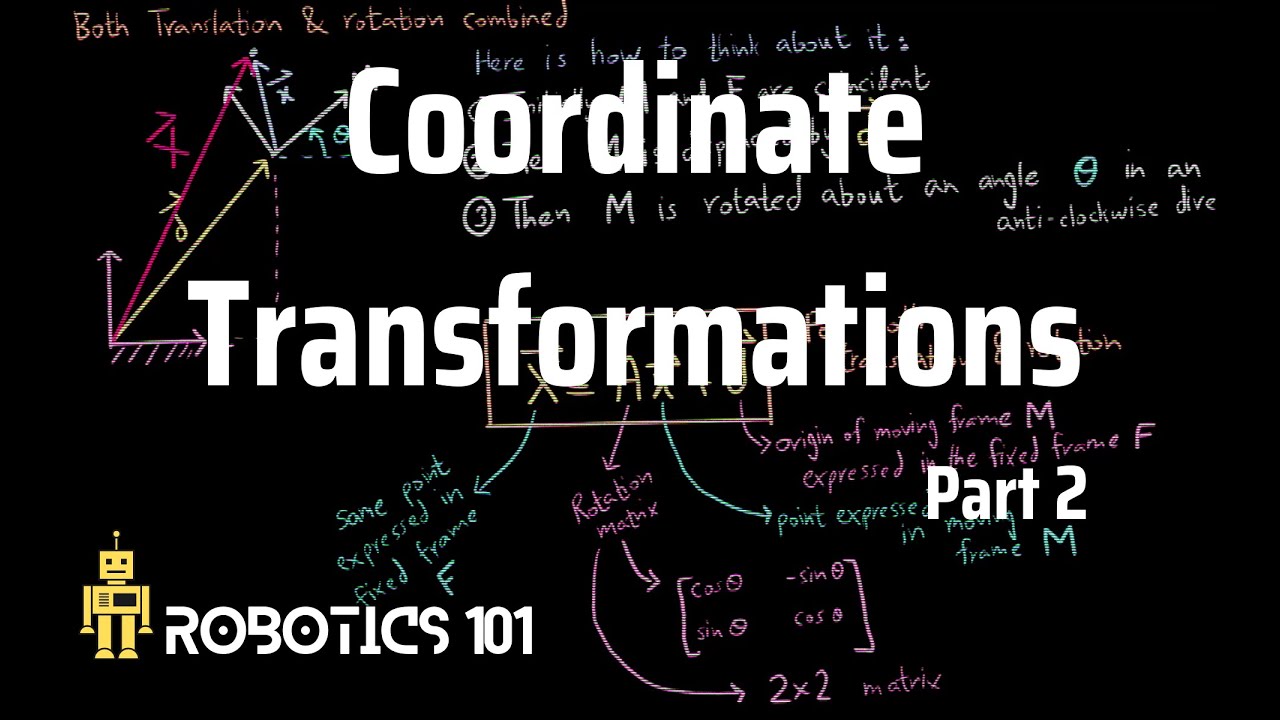
Coordinate Transformations in 2D (Part 2) | Mapping | Robotics 101
Показать описание
In this video, we discuss the general case of coordinate transformations consisting of both rotation & translation combined.
The mathematics behind it is also shown in the light of robotics and I have included an example along the way.
🌟 Contents 🌟
00:00 General coordinate transformation
02:10 Special cases of coordinate transformation
03:06 Example of changing frames (moving from fixed frame to moving frame)
In the next couple of videos, we take it a step further and apply coordinate transformations to 2D robots to see how it enables us to change the representation of an object from a body frame to a fixed frame (and vice versa).
------
This video is part of the Robotics 101 tutorial series which covers kinematics and modeling of 2D & 3D robots.
This tutorial lesson series starts from the basics of robotics (assuming no prior knowledge) and gradually builds on in bite-sized videos of 10 minutes or less. By following along, you will soon become extremely good in the kinematics and modeling aspects of robots. And these will help you to design and build robots.
Here's what we will cover in this video series:
1. Co-ordinate Transformation for 2D & 3D robots
2. Homogeneous Transformations for 2D & 3D robots
3. Forward Kinematics
4. Inverse Kinematics
5. Robotic wrists (end-effector)
6. End-effector Velocities and Jacobians
7. Singularities of robots
8. Gimbal Locks
9. Forces & Torques
I will be uploading 1 video per week. If you find these helpful, don't forget to share and subscribe!
_____________________________
👉 Link to the Robotics 101 playlist
Robotics 101 - Robotics full course for beginners - Kinematics and Modeling
#roboticsforbeginners #roboticsTutorials #robotics #learnrobotics#homogenoustransformationmatrices #configuration #rotationmatrix #mechatronics #orientation #orientationinrobotics #transformationmatrices #displacementinrobotics #poseinrobotics #pose #translationandrotation
The mathematics behind it is also shown in the light of robotics and I have included an example along the way.
🌟 Contents 🌟
00:00 General coordinate transformation
02:10 Special cases of coordinate transformation
03:06 Example of changing frames (moving from fixed frame to moving frame)
In the next couple of videos, we take it a step further and apply coordinate transformations to 2D robots to see how it enables us to change the representation of an object from a body frame to a fixed frame (and vice versa).
------
This video is part of the Robotics 101 tutorial series which covers kinematics and modeling of 2D & 3D robots.
This tutorial lesson series starts from the basics of robotics (assuming no prior knowledge) and gradually builds on in bite-sized videos of 10 minutes or less. By following along, you will soon become extremely good in the kinematics and modeling aspects of robots. And these will help you to design and build robots.
Here's what we will cover in this video series:
1. Co-ordinate Transformation for 2D & 3D robots
2. Homogeneous Transformations for 2D & 3D robots
3. Forward Kinematics
4. Inverse Kinematics
5. Robotic wrists (end-effector)
6. End-effector Velocities and Jacobians
7. Singularities of robots
8. Gimbal Locks
9. Forces & Torques
I will be uploading 1 video per week. If you find these helpful, don't forget to share and subscribe!
_____________________________
👉 Link to the Robotics 101 playlist
Robotics 101 - Robotics full course for beginners - Kinematics and Modeling
#roboticsforbeginners #roboticsTutorials #robotics #learnrobotics#homogenoustransformationmatrices #configuration #rotationmatrix #mechatronics #orientation #orientationinrobotics #transformationmatrices #displacementinrobotics #poseinrobotics #pose #translationandrotation
 0:08:52
0:08:52
Coordinate Transformations in 2D | Mapping | Robotics 101
 0:09:13
0:09:13
Coordinate Transformations in 2D (Part 3) | Mapping | Robotics 101
 0:04:49
0:04:49
Coordinate Transformations in 2D (Part 2) | Mapping | Robotics 101
 0:06:53
0:06:53
Quick Understanding of Homogeneous Coordinates for Computer Graphics
 0:08:24
0:08:24
Rotation Matrix for Coordinate Transformation
 0:39:45
0:39:45
Photogrammetry2 Lecture - Coordinate Transformation
 0:02:11
0:02:11
Homogeneous Coordinates
 0:05:36
0:05:36
Computer Graphics: Lecture #15: Transformation between coordinate systems
 0:10:48
0:10:48
2d translation example | Transformation| Computer graphics | Lec-19 | Bhanu Priya
 0:09:18
0:09:18
9.4-9.5 - 3D Coordinates and coordinate transformations
 0:02:59
0:02:59
Homogeneous Coordinates for 2D Transformations
 0:08:49
0:08:49
Rotation Matrix | Coordinate Transformations | Robotics 201
 0:18:26
0:18:26
Lecture 5 - Area Scaling and homogeneous coordinates in 2d transformations
 0:02:13
0:02:13
Animated Coordinate transform in 2D XY Plane
 0:05:31
0:05:31
Translating Shapes On The coordinate Plane - Transformations
 0:01:50
0:01:50
2D Scaling in Homogeneous Coordinates
 0:06:48
0:06:48
Transformations - Rotate 90 Degrees Around The Origin
 0:10:13
0:10:13
Spatial Descriptions and Transformation Matrices for Robotic Manipulators
 0:43:51
0:43:51
Translations Reflections and Rotations - Geometric Transformations!
 0:03:17
0:03:17
Physics Ch 67.1 Advanced E&M: Review Vectors (14 of 55) Coordinate Transformation in 3-D: Ex. 1
 0:10:14
0:10:14
Algebra Basics: Graphing On The Coordinate Plane - Math Antics
 0:05:11
0:05:11
Physics Ch 67.1 Advanced E&M: Review Vectors (12 of 55) Coordinate Transformation in 2-D: Ex.
 0:01:32
0:01:32
Math Shorts Episode 4 - Reflection
 0:13:08
0:13:08
Change of Variables and the Jacobian
Комментарии