filmov
tv
PID Controllers in Simulink from Scratch for Beginners - Control Engineering Tutorials

Показать описание
#simulink #matlab #matlabtutorials #controltheory #controlengineering #signal #signalprocessing #mechatronics #robotics #automation #machinelearning #aleksandarhaber #signalprocessing #estimation #kalmanfilter #statistics #mechanicalengineering #electricalengineering
It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way:
- You Can also press the Thanks YouTube Dollar button
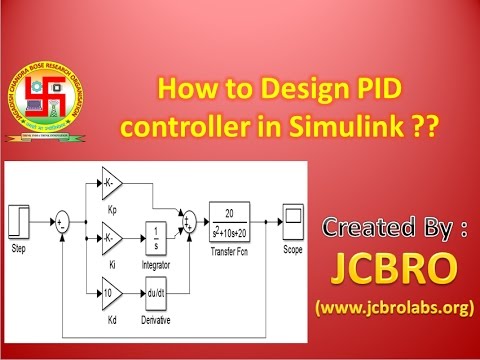
In this control engineering and control system tutorial, we explain how to implement Proportional, Differential, and Integral (PID) Controllers in Simulink and MATLAB from scratch. This tutorial is designed for students and engineers people who do not have a background in control engineering or Simulink. We explain how to model the PID controller by using an integrator, differentiator, and gain block in Simulink. Then, we explain how to visualize the results by using Simulink probes.
The PID controller consists of three terms:
(1) proportional gain
(2) derivative gain
(3) integral gain
All three gains are used in a properly designed PID controller. The integral gain is used to eliminate the steady-state error.
It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way:
- You Can also press the Thanks YouTube Dollar button
In this control engineering and control system tutorial, we explain how to implement Proportional, Differential, and Integral (PID) Controllers in Simulink and MATLAB from scratch. This tutorial is designed for students and engineers people who do not have a background in control engineering or Simulink. We explain how to model the PID controller by using an integrator, differentiator, and gain block in Simulink. Then, we explain how to visualize the results by using Simulink probes.
The PID controller consists of three terms:
(1) proportional gain
(2) derivative gain
(3) integral gain
All three gains are used in a properly designed PID controller. The integral gain is used to eliminate the steady-state error.
 0:19:57
0:19:57
PID Controllers in Simulink from Scratch for Beginners - Control Engineering Tutorials
 0:12:29
0:12:29
PID Controller | how to design PID controller in simulink
 0:23:13
0:23:13
Simulink Control Systems and PID, Matlab R2020b
 0:11:42
0:11:42
What Is PID Control? | Understanding PID Control, Part 1
 0:09:25
0:09:25
PID Controller Explained
 0:02:50
0:02:50
Getting Started with Simulink, Part 4: How to Tune a PID Controller
 0:47:14
0:47:14
From PID Control to Adaptive Control: Systematically Designing Controllers in Simulink
 0:06:01
0:06:01
How to Automatically Tune PID Controllers
 0:10:25
0:10:25
How to Design PID controller in Simulink??
 0:17:19
0:17:19
PID Control in Simulink: CSTR Tutorial
 0:00:13
0:00:13
Modeling and Simulation for the Excavator in MATLAB Simscape - PID Control #matlab #simscape
 0:00:10
0:00:10
How PID Controllers work | Practical Demonstration
 0:11:47
0:11:47
How To Tune PID Controller in MATLAB SIMULINK ? | Dr. J. A. Laghari
 0:00:06
0:00:06
Position control of DC motor using MATLAB simulink-arduino || PID control
 0:00:12
0:00:12
Modeling and Simulation for the Inverted Pendulum on Cart in MATLAB Simulink PID Control #shorts
 0:33:34
0:33:34
PID Controller Tuning in Simulink/MATLAB Using Ziegler-Nichols method
 0:00:30
0:00:30
Half Car Vehicle Suspension PID controller | Matlab Simulink Assignment
 0:00:16
0:00:16
Modelling and design of PID controller for voltage control of AC hybrid micro-grid
 0:07:15
0:07:15
How to Design PID Controllers for Power Converters
 0:10:44
0:10:44
Anti-windup for PID control | Understanding PID Control, Part 2
 0:34:16
0:34:16
Simulink Simulation of PID Control for Active Suspension of Quarter Car Model - Control Tutorial
 0:08:31
0:08:31
Designing PID Controller in Simulink / MATLAB
 0:00:30
0:00:30
Active suspension pid control & Fuzzy PID controller - Matlab Simulink model
 0:26:53
0:26:53
PID Control and Modeling of Nonlinear Liquid Tank in MATLAB and Simulink - Control Engineering
Комментарии