filmov
tv
From PID Control to Adaptive Control: Systematically Designing Controllers in Simulink

Показать описание
While PID control continues to be ubiquitous, other control techniques such as adaptive control and learning-based control are gaining more acceptance. In this session, MathWorks engineers will walk you through how you can use systematic and automated ways to quickly design and implement different types of controllers, ranging from PID controllers to model reference adaptive controllers.
Through demonstrations, you will learn how to:
Automatically tune PID controllers for SISO, MIMO, and gain scheduled control systems.
Generate code to automatically tune PID controllers on hardware such as Speedgoat target computers or Texas Instruments C2000 microcontrollers
Implement model-free adaptive control techniques such as extremum seeking and model reference adaptive control for systems with unknown or changing plant dynamics and disturbances.
Use the links below to experiment with the demos used in this webinar:
0:00 – Introduction
2:02 – Control design workflows in Simulink
5:07- Tuning a PID controller to meet design specifications
10:09- Tuning a PID controller when Simulink model is not available
18:24- Tuning MIMO controllers
28:43- Tuning PID controllers in real-time
35:53- Designing adaptive controllers
44:25- Summary
Through demonstrations, you will learn how to:
Automatically tune PID controllers for SISO, MIMO, and gain scheduled control systems.
Generate code to automatically tune PID controllers on hardware such as Speedgoat target computers or Texas Instruments C2000 microcontrollers
Implement model-free adaptive control techniques such as extremum seeking and model reference adaptive control for systems with unknown or changing plant dynamics and disturbances.
Use the links below to experiment with the demos used in this webinar:
0:00 – Introduction
2:02 – Control design workflows in Simulink
5:07- Tuning a PID controller to meet design specifications
10:09- Tuning a PID controller when Simulink model is not available
18:24- Tuning MIMO controllers
28:43- Tuning PID controllers in real-time
35:53- Designing adaptive controllers
44:25- Summary
 0:47:14
0:47:14
From PID Control to Adaptive Control: Systematically Designing Controllers in Simulink
 0:00:16
0:00:16
Python PID Tuning: Method 4 - AutoTuner with Adaptive Control
 0:00:52
0:00:52
beoTune© : Adaptive Control - Real Time PID AutoTuner
 0:00:36
0:00:36
Adaptive PID Controller
 0:04:36
0:04:36
Gain-Scheduled PID Controllers for PMSM Drives
 0:10:33
0:10:33
PID vs. Other Control Methods: What's the Best Choice
 0:01:32
0:01:32
Design and Implementation of Adaptive PID Controller
 0:00:45
0:00:45
Python PID SOPDT Tuning: Method 4 - AutoTuner with Adaptive Control
 0:17:08
0:17:08
What Is Model Reference Adaptive Control (MRAC)? | Learning-Based Control, Part 3
 0:16:18
0:16:18
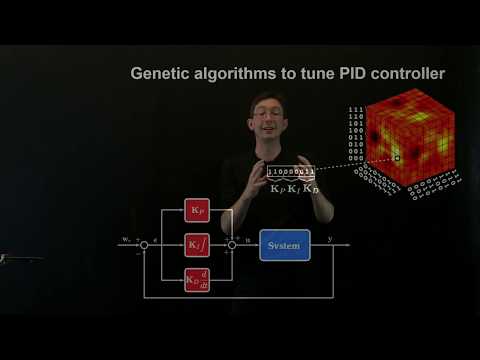
Machine Learning Control: Tuning a PID Controller with Genetic Algorithms
 0:02:58
0:02:58
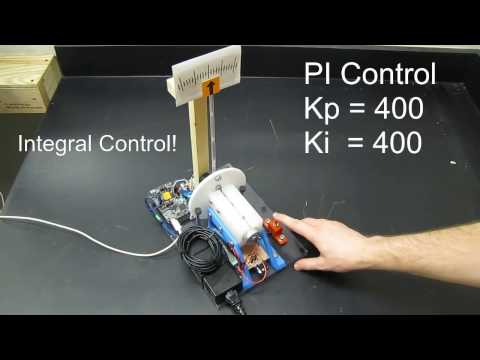
Hardware Demo of a Digital PID Controller
 0:00:14
0:00:14
PID Adaptive Auto Tuner - ControlLogix PID Auto Tuning with Adaptive Control
 0:00:46
0:00:46
tapaTune© - PID Adaptive Control 💯💻🖥
 0:05:48
0:05:48
Adaptive neural network PI controller
 0:06:28
0:06:28
AI for Nonlinear Process (Adaptive PID Controller)
 0:00:24
0:00:24
Drone PID Control Testing
 0:04:19
0:04:19
PID Control Basic auto cruise control and flight speed control technology
 0:08:26
0:08:26
Projek Praktikum Kendali Adaptif - Model Reference Adaptive PID Control Algorithm For a Tank System
 0:04:41
0:04:41
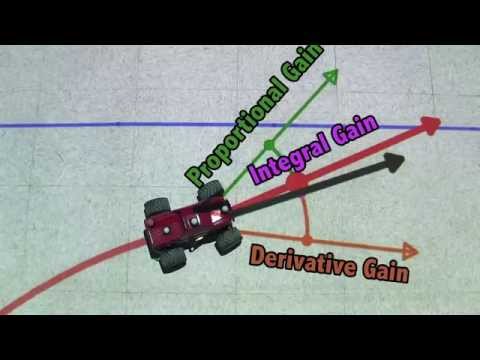
Controlling Self Driving Cars
 0:01:41
0:01:41
Model Reference Adaptive Control of a Quadrotor UAV with Parametric Uncertainties
 0:00:15
0:00:15
Single neuron adaptive PID control for permanent magnet motors/simulink
 0:12:23
0:12:23
Why Adaptive Control?
 0:02:43
0:02:43
PID VS Model Predictive Control (MPC) - (Enrollment link in the description)
 0:01:02
0:01:02
SDCND Term 2: Project 4 PID Control Adaptive Throttle
Комментарии