filmov
tv
Using the HC-SR04 Ultrasonic Distance Sensor with Arduino - Everything you need to know!
Показать описание
Learn everything you need to know to use the HC-SR04 Ultrasonic Distance Sensor with an Arduino.
The HC-SR04 Ultrasonic sensor is a versatile device that has become a staple in robotics projects. This inexpensive component measures the distance between itself and the nearest solid object using pulses of ultrasonic sound. It has reasonable accuracy “out of the box” and can be made even more accurate with one additional component.
In this tutorial, we’ll learn how to use the HC-SR04 with an Arduino. As it turns out there is more than one way to do this, so we’ll examine them all. You can apply the same knowledge to use the sensor with other microcontrollers or with a microcomputer like the Raspberry Pi.
We’ll start by learning how the HC-SR04 works and how its input and outputs function.
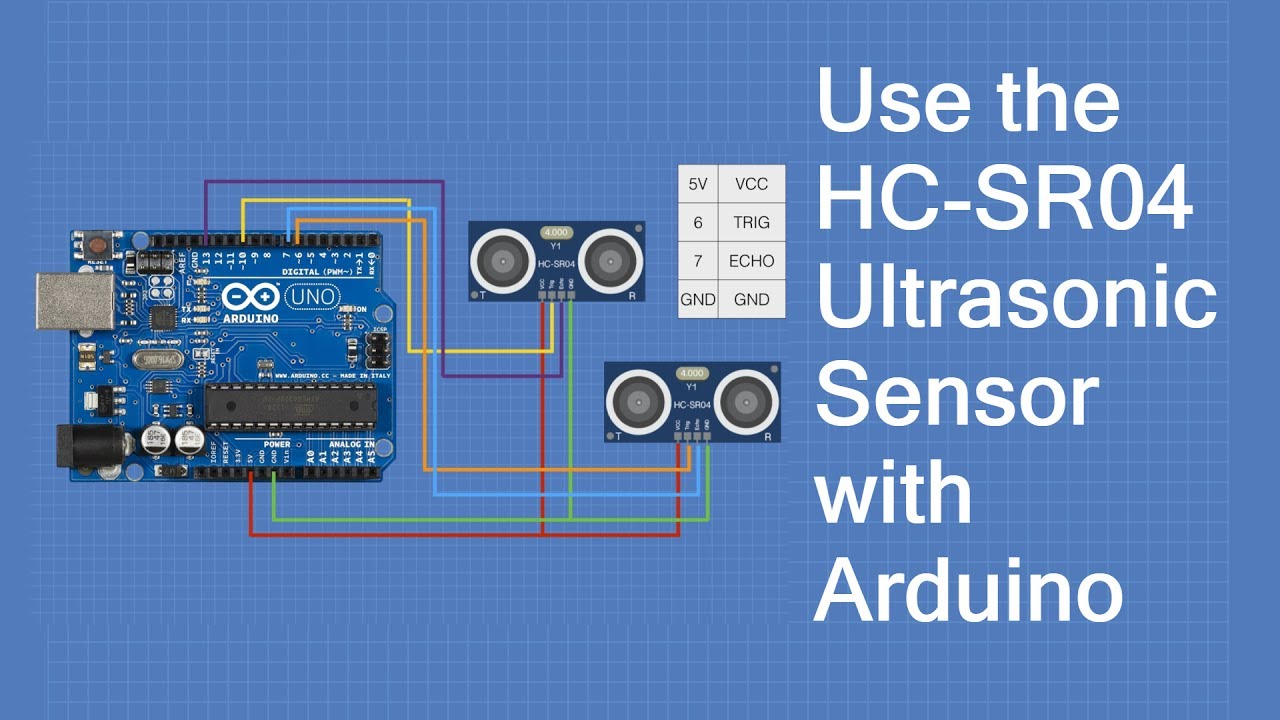
Next, we’ll connect it to an Arduino and write a simple sketch to make it work. I'll show you the test arrangement I set up on my workbench and we’ll use that to measure the accuracy of the sensor.
Then we’ll move on to some improved code using a “code library” called “NewPing”. If you are new to the Arduino and have not used a code library before then this is an excellent opportunity to learn how to increase your programming expertise. Actually, we will end up using three code libraries by the time the video has finished and I’ll show you two different methods of doing this.
While the sensor is reasonably accurate there is room for improvement, as our bench testing will confirm. I’ll show you how you can add an inexpensive temperature and humidity sensor to increase the accuracy of the HC-SR04 by compensating for the change in the speed of sound due to the ambient temperature and humidity.
We will also see how the HC-SR04 can be used in “3-Wire Mode”, eliminating one connection to the Arduino without sacrificing performance. This is great information if you need to save an Arduino I/O pin for another application.
And finally, we will see how we can use multiple HC-SR04’s in the same circuit, a common requirement when building a robot.
00:00 - Introduction
01:46 - How the HC-SR04 Works
08:21 - Basic Arduino Hookup
08:53 - Sketch 1 - Basic Hookup Demo
14:03 - NewPing Code Library
14:21 - Sketch 2 - First NewPing Test
19:20 - Sketch 3 - NewPing with Duration
21:56 - Sketch 4 - NewPing with Iterations
24:37 - Getting Improved Accuracy
26:47 - Using the DHT22
28:31 - Sketch 5 - DHT22 Test
33:06 - Sketch 6 - Improved HC-SR04 with DHT22
38:03 - The HC-SR04 in 3-Wire Mode
38:54 - Sketch 7 - HC-SR04 in 3-Wire Mode
39:51 - Using Multiple HC-SR04 Sensors
41:08 - Sketch 8 - Multiple HC-SR04 Test
As always please comment below and please subscribe!
The HC-SR04 Ultrasonic sensor is a versatile device that has become a staple in robotics projects. This inexpensive component measures the distance between itself and the nearest solid object using pulses of ultrasonic sound. It has reasonable accuracy “out of the box” and can be made even more accurate with one additional component.
In this tutorial, we’ll learn how to use the HC-SR04 with an Arduino. As it turns out there is more than one way to do this, so we’ll examine them all. You can apply the same knowledge to use the sensor with other microcontrollers or with a microcomputer like the Raspberry Pi.
We’ll start by learning how the HC-SR04 works and how its input and outputs function.
Next, we’ll connect it to an Arduino and write a simple sketch to make it work. I'll show you the test arrangement I set up on my workbench and we’ll use that to measure the accuracy of the sensor.
Then we’ll move on to some improved code using a “code library” called “NewPing”. If you are new to the Arduino and have not used a code library before then this is an excellent opportunity to learn how to increase your programming expertise. Actually, we will end up using three code libraries by the time the video has finished and I’ll show you two different methods of doing this.
While the sensor is reasonably accurate there is room for improvement, as our bench testing will confirm. I’ll show you how you can add an inexpensive temperature and humidity sensor to increase the accuracy of the HC-SR04 by compensating for the change in the speed of sound due to the ambient temperature and humidity.
We will also see how the HC-SR04 can be used in “3-Wire Mode”, eliminating one connection to the Arduino without sacrificing performance. This is great information if you need to save an Arduino I/O pin for another application.
And finally, we will see how we can use multiple HC-SR04’s in the same circuit, a common requirement when building a robot.
00:00 - Introduction
01:46 - How the HC-SR04 Works
08:21 - Basic Arduino Hookup
08:53 - Sketch 1 - Basic Hookup Demo
14:03 - NewPing Code Library
14:21 - Sketch 2 - First NewPing Test
19:20 - Sketch 3 - NewPing with Duration
21:56 - Sketch 4 - NewPing with Iterations
24:37 - Getting Improved Accuracy
26:47 - Using the DHT22
28:31 - Sketch 5 - DHT22 Test
33:06 - Sketch 6 - Improved HC-SR04 with DHT22
38:03 - The HC-SR04 in 3-Wire Mode
38:54 - Sketch 7 - HC-SR04 in 3-Wire Mode
39:51 - Using Multiple HC-SR04 Sensors
41:08 - Sketch 8 - Multiple HC-SR04 Test
As always please comment below and please subscribe!
 0:48:03
0:48:03
Using the HC-SR04 Ultrasonic Distance Sensor with Arduino - Everything you need to know!
 0:05:28
0:05:28
HC-SR04 Ultrasonic Distance Sensor and Arduino (Lesson #9)
 0:07:22
0:07:22
Arduino ultrasonic sensor led projects | Hc-sr04 Ultrasonic sensor
 0:06:31
0:06:31
Using the HC-SR04 Ultrasonic Range Sensor with an Arduino - Tutorial
 0:03:26
0:03:26
Arduino distance measurement using Ultrasonic HC-SR04 Sensor
 0:04:07
0:04:07
Using Ultrasonic Distance Sensor HC-SR04 with Buzzer, LED and Arduino
 0:05:31
0:05:31
Arduino distance sensor project HC-SR04 Ultrasonic Distance sensor in Arduino projects for beginners
 0:00:21
0:00:21
Measuring distance using raspberry pi and ultrasonic sensor hc-sr04
 0:02:39
0:02:39
How to make distance sensor with HC-SR04 and led
 0:05:30
0:05:30
Using Ultrasonic Distance Sensor HC-SR04 with LCD Display and Arduino
 0:03:29
0:03:29
Measuring Distances with the HC-SR04 Ultrasonic Sensor, Arduino and Python
 0:04:10
0:04:10
HCSR04 Ultrasonic Sensor With Arduino in 3 Minutes!
 0:05:16
0:05:16
Ultrasonic Sensor HC-SR04 and Arduino Tutorial
 0:06:01
0:06:01
Ultrasonic sensor HC-SR04 with Arduino(code explained) Distance Measuring Senosr -Arduino tutorial 9
 0:02:02
0:02:02
Ultrasonic sensor working principle | How does HC-SR04 Work
 0:16:30
0:16:30
HC-SR04 Ultrasonic Distance Sensor with Arduino
 0:00:11
0:00:11
Ultrasonic sensor HC-SR04 - Arduino due
 0:05:44
0:05:44
The BEST Ultrasonic distance sensor US-100 vs. HC-SR04 vs. HC-SR05
 0:12:03
0:12:03
#40 Ultrasonic Distance Sensors Arduino Tutorial and Comparison for HC-SR04, HY-SRF05, US-015
 0:06:14
0:06:14
Ultrasonic Distance Sensor HC-SR04 with Arduino | Ultrasonic Range Finder
 0:00:37
0:00:37
How to use Ultrasonic Sensor HC-SR04 with Arduino | Distance Measurement Project using Arduino
 0:02:42
0:02:42
HC-SR04 Ultrasonic Distance Finder LED Display without Arduino
 0:07:03
0:07:03
PING vs HC-SR04 Ultrasonic Distance Sensors for Arduino
 0:00:09
0:00:09
Distance Measurement with Ultrasonic Sensor, OLED and Servo Angle Control! 🚀🔧#shorts #diy #arduino...
Комментарии