filmov
tv
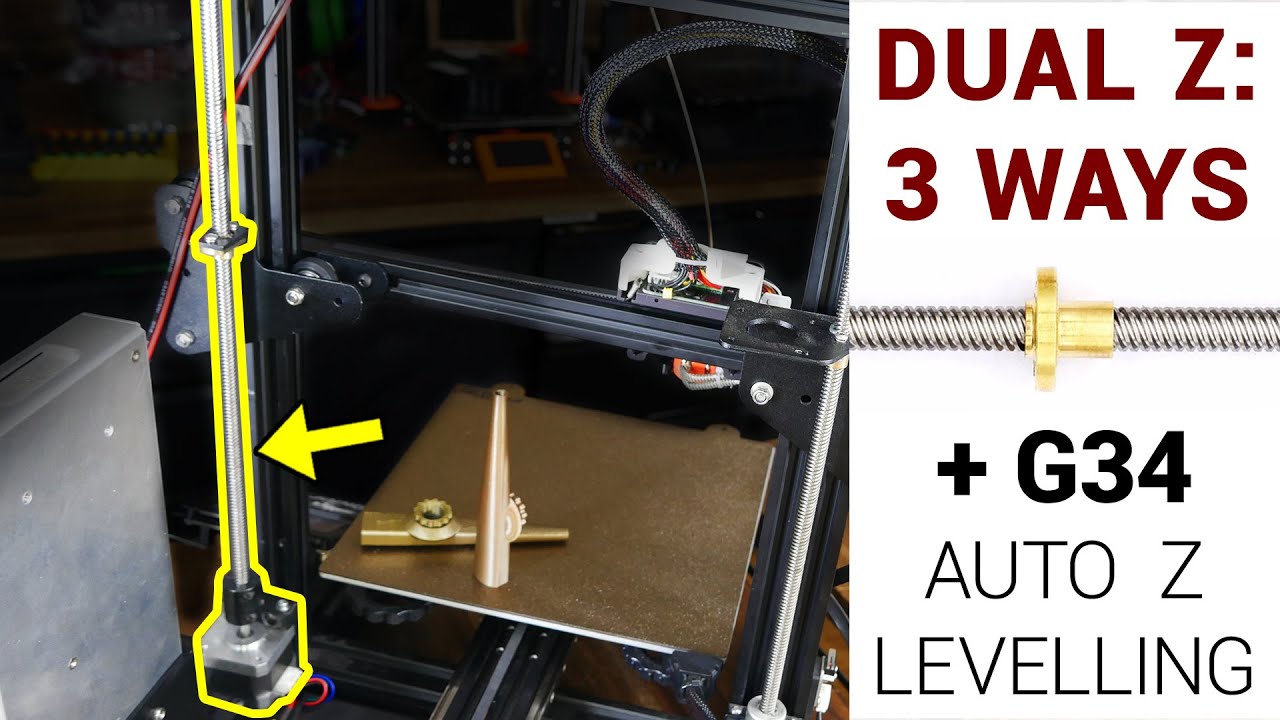
3 ways to add a dual Z axis - Including G34 auto Z levelling
Показать описание
A patreon request: make a guide on how to add a second Z axis to an Ender 3. In this video we achieve that, showcasing three methods to get the gantry level. This includes a mechanical belt driven kit from TH3D, adding a 2nd stepper motor in parallel, and a 2nd firmware controlled stepper with G34 auto z levelling.
If you were looking to do this upgrade, hopefully one of these methods will be suitable for you!
Everything in this video was purchased with my own money. The links all point to TH3D for convenience only. 3D printed versions of the concept are linked below.
0:00 Introduction
0:42 Identifying the problem
1:56 Overview of the the three methods
3:06 Ender 3 PSU relocation
4:36 Option 1: Mechanical - belt driven leadscrew
7:48 Alignment
9:39 Option 2: 2nd stepper motor in parallel
12:39 Flexible coupler to remove Z banding
13:09 Option 3: 2nd stepper motor with G34 auto alignment
Purchase the BTT SKR E3 Turbo:
14:37 G34 minimum firmware changes
14:56 G34 default behaviour
16:11 G34 slicer start gcode change
16:28 G34 advanced firmware changes
17:59 Conclusion - You on Kazoo!
Get Quality Resins from 3D Printers Online. 5% off storewide for Teaching Tech subscribers [Code: tech5]
Take a look around and if you like what you see, please subscribe.
If you were looking to do this upgrade, hopefully one of these methods will be suitable for you!
Everything in this video was purchased with my own money. The links all point to TH3D for convenience only. 3D printed versions of the concept are linked below.
0:00 Introduction
0:42 Identifying the problem
1:56 Overview of the the three methods
3:06 Ender 3 PSU relocation
4:36 Option 1: Mechanical - belt driven leadscrew
7:48 Alignment
9:39 Option 2: 2nd stepper motor in parallel
12:39 Flexible coupler to remove Z banding
13:09 Option 3: 2nd stepper motor with G34 auto alignment
Purchase the BTT SKR E3 Turbo:
14:37 G34 minimum firmware changes
14:56 G34 default behaviour
16:11 G34 slicer start gcode change
16:28 G34 advanced firmware changes
17:59 Conclusion - You on Kazoo!
Get Quality Resins from 3D Printers Online. 5% off storewide for Teaching Tech subscribers [Code: tech5]
Take a look around and if you like what you see, please subscribe.
 0:18:50
0:18:50
3 ways to add a dual Z axis - Including G34 auto Z levelling
 0:21:36
0:21:36
3 Ways to Add an Outlet In a Finished Room
 0:05:20
0:05:20
3 Ways To Add Hair To Braids To Extend Length | Adding Hair To Ends Of Braids
 0:00:16
0:00:16
3 ways to add a pop of colour to your eye makeup looks
 0:04:27
0:04:27
How Do You Add 3 Numbers?
 0:07:10
0:07:10
3 Easy & Delicious Ways to Use Your HOT Homegrown Peppers 🌶️
 0:18:37
0:18:37
3 Ways to Add a User on Windows Server (2016, 2019, 2022)
 0:35:52
0:35:52
3 WAYS To Add A BLOG To Your WordPress Website | Spectra Course
 0:08:06
0:08:06
How to Add a 3 Way Switch To an Existing Single Switch Location
 0:11:13
0:11:13
Add Texture To Your Stamping - Stamp Kissing (3 Ways)!
 0:08:06
0:08:06
3 WAYS TO ADD A STICKER BACKGROUND | Sticker Background Tutorial with Procreate + Cricut (EASY!)
 0:02:51
0:02:51
3 Ways to Add Color to Your Kitchen | HGTV
 0:15:41
0:15:41
Add a Receptacle to a 3-Way Switch System + Wiring from Plans
 0:05:34
0:05:34
3 Ways to Add a Target Line to an Excel Pivot Chart
 0:00:55
0:00:55
3 ways to add protein to your diet 💪🏽 #proteinpacked #recipe
 0:10:25
0:10:25
3 WAYS TO ADD CLUB HEAD SPEED WITH THE DRIVER
 0:00:53
0:00:53
3 Ways to ADD A PAGE to your Notebook in your reMarkable 2 | #remarkable2 #beginners #notebook2022
 0:02:05
0:02:05
3 Ways to Add Bluetooth to any car
 0:16:46
0:16:46
3 Ways to Add Volumetrics to Your Scenes
 0:13:05
0:13:05
3 Ways to Add Reverb to a Track
 0:06:33
0:06:33
How To - 3 ways to add nocking points - (Pros & Cons of each)
 0:01:02
0:01:02
How to Add Multiple Accounts to Meta Quest 3 (Share Games & Apps) - Full Guide
 0:04:54
0:04:54
3 Ways to Add a Halftone Effect in Illustrator
 0:12:03
0:12:03
The Tango Cross: 3 ways to add a Boleo to the cross (steps & technique)
Комментарии