filmov
tv
Representations vs Algorithms: Symbols and Geometry in Robotics

Показать описание
Nicholas Roy, MIT
Abstract: In the last few years, the ability for robots to understand and operate in the world around them has advanced considerably. Examples include the growing number of self-driving car systems, the considerable work in robot mapping, and the growing interest in home and service robots. However, one limitation is that robots most often reason and plan using very geometric models of the world, such as point features, dense occupancy grids and action cost maps. To be able to plan and reason over long length and timescales, as well as planning more complex missions, robots need to be able to reason about abstract concepts such as landmarks, segmented objects and tasks (among other representations). I will talk about recent work in joint reasoning about semantic representations and physical representations and what these joint representations mean for planning and decision making.
Abstract: In the last few years, the ability for robots to understand and operate in the world around them has advanced considerably. Examples include the growing number of self-driving car systems, the considerable work in robot mapping, and the growing interest in home and service robots. However, one limitation is that robots most often reason and plan using very geometric models of the world, such as point features, dense occupancy grids and action cost maps. To be able to plan and reason over long length and timescales, as well as planning more complex missions, robots need to be able to reason about abstract concepts such as landmarks, segmented objects and tasks (among other representations). I will talk about recent work in joint reasoning about semantic representations and physical representations and what these joint representations mean for planning and decision making.
 0:48:40
0:48:40
Representations vs Algorithms: Symbols and Geometry in Robotics
 0:11:16
0:11:16
Algorithm and Flowcharts: Symbols and Examples
 0:02:18
0:02:18
Software Flowchart
 0:01:57
0:01:57
Flowchart definition and symbols
 0:02:27
0:02:27
Computer Science Basics: Sequences, Selections, and Loops
 0:56:51
0:56:51
Algorithm and Flowchart
 0:05:41
0:05:41
Difference between Flowchart and Algorithm | Flowchart Vs Algorithm | Learn Coding
 0:34:36
0:34:36
algorithm representation
 0:05:26
0:05:26
How to Make Algorithm and Flowchart from a given problem
 0:05:45
0:05:45
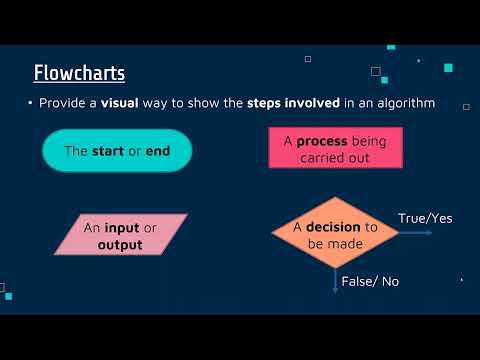
Flowcharts
 0:00:16
0:00:16
Flowchart symbols|flowchart #algorithm #flowchart #youtubeshorts #instareel #viral #viralvideo
 0:07:25
0:07:25
Algorithm Vs Flowchart Vs Pseudocode | Difference Between Algorithm And Flowchart | Intellipaat
 0:04:34
0:04:34
What is a Flowchart - Flowchart Symbols, Flowchart Types, and More
 0:08:53
0:08:53
Algorithm and Flow Chart
 0:15:09
0:15:09
Representation of an Algorithm
 0:05:11
0:05:11
Is math discovered or invented? - Jeff Dekofsky
 0:04:40
0:04:40
How exactly does binary code work? - José Américo N L F de Freitas
 0:08:09
0:08:09
Representation of Algorithms ( flowchart & Pseudocode
 0:00:33
0:00:33
9) A is a graphical representation of an algorithm. Answer: Page 3 of 9. 10) In a flowchart, the or…...
 0:06:54
0:06:54
#01 Flowchart Symbols || Algorithm and Flowchart for Finding the Largest of Two Numbers
 0:02:46
0:02:46
Dijkstra's algorithm in 3 minutes
 0:15:46
0:15:46
1.8.1 Asymptotic Notations Big Oh - Omega - Theta #1
 0:13:37
0:13:37
Flowcharts and Pseudocode - #1 | GCSE (9-1) in Computer Science | AQA, OCR and Edexcel
 0:00:34
0:00:34
Senior Programmers vs Junior Developers #shorts
Комментарии