filmov
tv
Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]

Показать описание
Here we design an optimal full-state feedback controller for the inverted pendulum on a cart example using the linear quadratic regulator (LQR). In Matlab, we find that this is a simple one-line command 'lqr'.
These lectures follow Chapter 8 from:
"Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control" by Brunton and Kutz
This video was produced at the University of Washington
These lectures follow Chapter 8 from:
"Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control" by Brunton and Kutz
This video was produced at the University of Washington
 0:17:24
0:17:24
What Is Linear Quadratic Regulator (LQR) Optimal Control? | State Space, Part 4
 0:13:04
0:13:04
Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]
 1:36:07
1:36:07
Introduction to Linear Quadratic Regulator (LQR) Control
 0:14:30
0:14:30
Why the Riccati Equation Is important for LQR Control
 0:24:36
0:24:36
Core Concepts: Linear Quadratic Regulators
 0:08:56
0:08:56
Overview of LQR for System Control
 0:01:00
0:01:00
APRICOT: Testing LQG and LQR controller on a Boeing 747
 0:37:07
0:37:07
Linear Quadratic Regulator (LQR) in Python - Detailed Explanation - Control Engineering Tutorial
 0:58:30
0:58:30
Implement Linear Quadratic Regulator (LQR) Control Algorithm in C++ From Scratch Using Newton Method
 0:28:24
0:28:24
Linear Quadratic Regulator LQR Control
 0:13:07
0:13:07
Linear Quadratic Regulator Example in MATLAB, and SIMULINK
 0:00:11
0:00:11
Self-balancing robot using LQR control
 0:49:33
0:49:33
mod11lec43-Optimal Control and Linear Quadratic Regulator (LQR)
 0:00:41
0:00:41
Linear Quadratic Regulator for a Landing Rocket Example
 0:02:11
0:02:11
Load Frequency Control with Linear Quadratic Regulator - MATLAB SIMULINK MODEL
 0:00:44
0:00:44
Quad-Copter LQR Control
 0:15:46
0:15:46
Control course: Linear quadratic regulator (introduction)
 0:01:16
0:01:16
Quadrotor | Trajectory Tracking with Linear Quadratic Regulator (LQR) (Version. 1)
 0:13:23
0:13:23
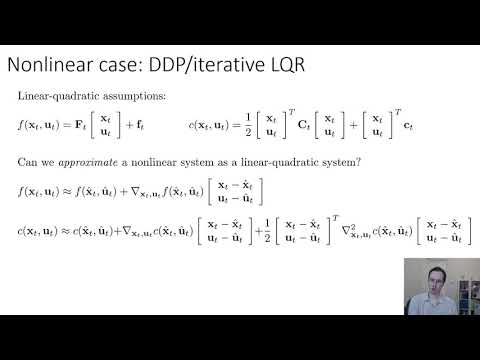
CS 285: Lecture 10, Part 4
 0:08:50
0:08:50
Guidance from Optimal Control - Section 1 Module 2 - The Linear Quadratic Regulator
 0:17:13
0:17:13
Linear Quadratic Regulator (LQR) - Episode 01: Introduction & Necessary Conditions
 0:22:21
0:22:21
Control of State-Space Models in Simulink By Using Linear Quadratic Regulator - Control Systems
 0:01:07
0:01:07
Inverted pendulum control, swing up and reference tracking (PID and LQR)
 0:08:33
0:08:33
Iterative linear quadratic regulator
Комментарии