filmov
tv
comma ai | Learning a Driving Simulator | Yassine Yousfi | COMMA_CON talks | Research | HQ version
Показать описание
Date of the stream 29 Jul 2023.
Yassine Yousfi social media:
Research:
View original video on Youtube:
Chapters:
00:00 intro
00:20 learning a driving simulator
00:36 imagined, predicted videos via ML
01:44 why a simulator
02:50 why not a classical simulator
04:00 small offset simulator
06:25 learning a driving simulator paper
07:10 ML simulator architecture
07:25 image tokenizer
08:32 source - 5120 bits - 1280 bits
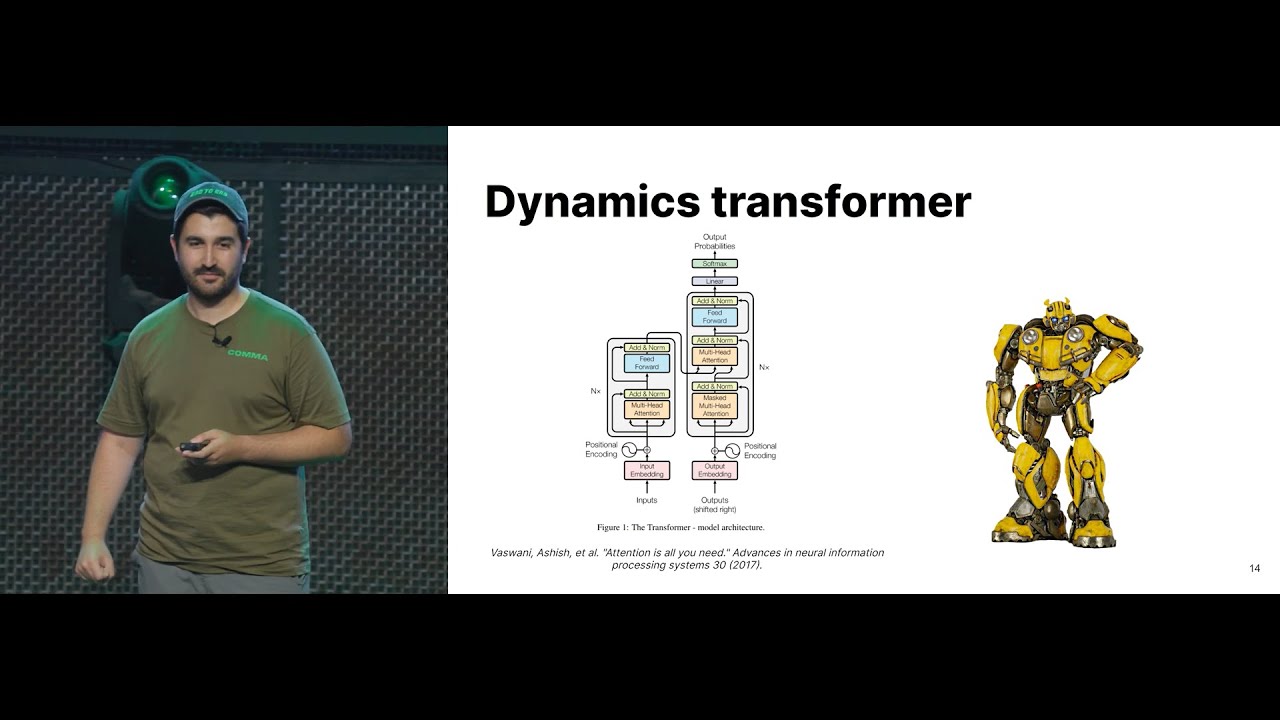
11:06 dynamics transformer
14:00 it works, straight, turning right, left
14:56 accelerating, braking
15:25 commaVQ opensource dataset
15:50 2x$1000 bounties
16:50 side note 1: tokenized driving models
17:25 side note 2: smooth decoder
18:29 raw - smooth rollout
18:44 side note 3: loss function for driving in ML simulator
20:02 next steps, auto-regressive sampling
22:03 using the learned simulator for traning driving models
22:13 beautiful rollouts properties
23:40 questions
23:52 conditioning on language?
24:10 pose tokens
25:18 bottlenecks to inference for real time
26:23 aplications for human indistinguishable rollouts
27:13 model collapse from simulation data
28:35 mass auto encoders
29:40 video decoder
30:00 INB frame, general i frame and p frame
30:40 output from the simulator used for training policy models
31:00 two models, end to end, same loss function
32:08 policy model will be trained on the simulator, not the vision model
32:25 how to keep up with machine learning research
33:15 you don't want to be the first one to replicate a paper
33:48 state of the art, leveraging other work and open sourcing
34:35 where do the model names come from, Nicki Minaj, Nicholas Cage
34:55 tokenize because cross entropy is the best loss function
35:50 interpreting the tokens
36:45 conditioning on geolocation
37:35 scaling to any type of robotics problem
38:41 adding language as the first input
40:05 why does it flicker
41:30 smoothing decoder, RNN layer
Official communication channels:
How to get a job:
How to collaborate:
Are you interested in openpilot?
Knowledge base:
Check out the code:
Is my car supported?
Frequently Asked Questions:
How to setup openpilot:
Comma Secure Shell:
API Documentation:
CAN analysis tool:
Review and annotate your driving data:
Leaderboard:
Comma Connect App:
Research:
Official George Hotz communication channels:
Follow for notifications:
Unofficial communities and resources:
Thank you for reading and using the SHOW MORE button.
We hope you enjoy watching George's videos as much as we do.
See you at the next video.
Yassine Yousfi social media:
Research:
View original video on Youtube:
Chapters:
00:00 intro
00:20 learning a driving simulator
00:36 imagined, predicted videos via ML
01:44 why a simulator
02:50 why not a classical simulator
04:00 small offset simulator
06:25 learning a driving simulator paper
07:10 ML simulator architecture
07:25 image tokenizer
08:32 source - 5120 bits - 1280 bits
11:06 dynamics transformer
14:00 it works, straight, turning right, left
14:56 accelerating, braking
15:25 commaVQ opensource dataset
15:50 2x$1000 bounties
16:50 side note 1: tokenized driving models
17:25 side note 2: smooth decoder
18:29 raw - smooth rollout
18:44 side note 3: loss function for driving in ML simulator
20:02 next steps, auto-regressive sampling
22:03 using the learned simulator for traning driving models
22:13 beautiful rollouts properties
23:40 questions
23:52 conditioning on language?
24:10 pose tokens
25:18 bottlenecks to inference for real time
26:23 aplications for human indistinguishable rollouts
27:13 model collapse from simulation data
28:35 mass auto encoders
29:40 video decoder
30:00 INB frame, general i frame and p frame
30:40 output from the simulator used for training policy models
31:00 two models, end to end, same loss function
32:08 policy model will be trained on the simulator, not the vision model
32:25 how to keep up with machine learning research
33:15 you don't want to be the first one to replicate a paper
33:48 state of the art, leveraging other work and open sourcing
34:35 where do the model names come from, Nicki Minaj, Nicholas Cage
34:55 tokenize because cross entropy is the best loss function
35:50 interpreting the tokens
36:45 conditioning on geolocation
37:35 scaling to any type of robotics problem
38:41 adding language as the first input
40:05 why does it flicker
41:30 smoothing decoder, RNN layer
Official communication channels:
How to get a job:
How to collaborate:
Are you interested in openpilot?
Knowledge base:
Check out the code:
Is my car supported?
Frequently Asked Questions:
How to setup openpilot:
Comma Secure Shell:
API Documentation:
CAN analysis tool:
Review and annotate your driving data:
Leaderboard:
Comma Connect App:
Research:
Official George Hotz communication channels:
Follow for notifications:
Unofficial communities and resources:
Thank you for reading and using the SHOW MORE button.
We hope you enjoy watching George's videos as much as we do.
See you at the next video.
 0:06:57
0:06:57
Comma.ai and Tesla FSD: How close are we to solving self-driving? | George Hotz and Lex Fridman
 0:42:46
0:42:46
comma ai | Learning a Driving Simulator | Yassine Yousfi | COMMA_CON talks | Research | ML
 0:42:13
0:42:13
comma ai | Learning a Driving Simulator | Yassine Yousfi | COMMA_CON talks | Research | HQ version
 0:09:24
0:09:24
Tesla vs comma.ai approach to machine learning | George Hotz and Lex Fridman
 0:04:51
0:04:51
Put Autopilot in YOUR Car | comma 3X + openpilot
 0:23:49
0:23:49
comma ai | Weixing Zhang | A Tour Through Driver Monitoring (DM) | COMMA_CON talks
 0:49:16
0:49:16
comma ai | Greg Hogan | Building Infrastructure to Solve Self Driving Cars | COMMA_CON talks
 0:13:51
0:13:51
We go riding with George Hotz and his $1,000 autonomous car | Comma.ai
 0:21:37
0:21:37
Applications of Artificial Neural Networks (ANN) in Real-World Scenarios AIML End-to-End Session 146
 0:32:02
0:32:02
comma ai | Navigate on openpilot | Mitchell Goff | COMMA_CON talks| ML Engineer
 0:27:13
0:27:13
comma ai | Can you tune my car? | Vivek Aithal | COMMA_CON talks | research | openpilot
 0:01:00
0:01:00
Experience comma.ai’s openpilot in this test drive with founder George Hotz | TryTech | TechCrunch
 0:31:56
0:31:56
comma ai | Willem Melching | openpilot team | The History of openpilot | COMMA_CON talks
 0:03:08
0:03:08
comma ai | Build the Future | George Hotz and comma.ai team | Join https://comma.ai/jobs
 0:37:05
0:37:05
comma supercomputer | Greg Hogan | COMMA_CON 2023
 0:37:20
0:37:20
AutoPilot for $1000? George Hotz of Comma AI | In Depth
 0:06:04
0:06:04
comma.ai Hackathon!
 0:36:45
0:36:45
comma ai | Adeeb Shihadeh | How We Test openpilot | openpilot testing | COMMA_CON talks
 0:30:06
0:30:06
Open sourcing for developers
 1:14:55
1:14:55
comma ai | Harald Schäfer | research team | Building a Super Human Driving Agent | COMMA_CON talks
 1:59:37
1:59:37
George Hotz: Comma.ai, OpenPilot, and Autonomous Vehicles | Lex Fridman Podcast #31
 0:26:34
0:26:34
Can you tune my car? | Vivek Aithal | COMMA_CON 2023
 0:31:56
0:31:56
Why Comma.ai Is Different To Every Other Autonomous Vehicle Startup Out There (Long Version)
 0:02:16
0:02:16
Comma.ai mission is to solve self-driving cars | George Hotz and Lex Fridman
Комментарии