filmov
tv
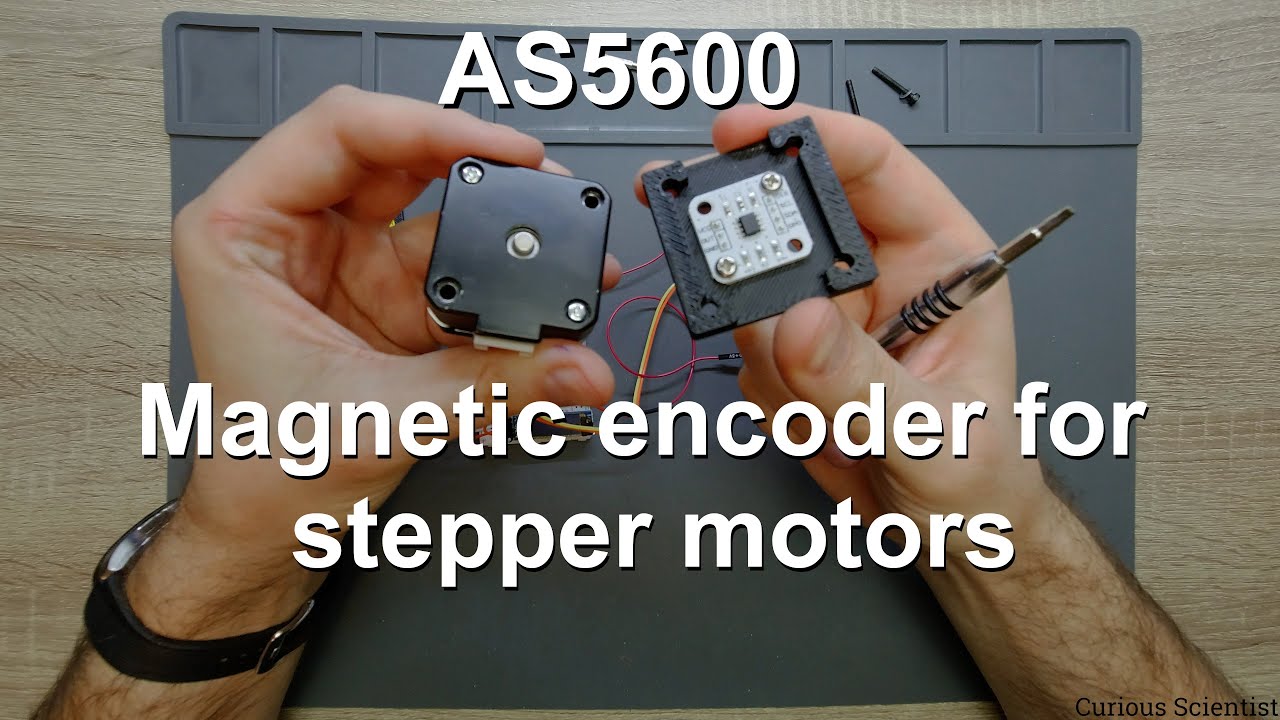
AS5600 magnetic position encoder - best encoder for stepper motors
Показать описание
In this video I show you how to use the AS5600 magnetic position encoder. This is a very powerful chip for projects where you need a precise information about the position of a shaft. Therefore, it is extremely useful for stepper motor-related projects because you can use the sensor to directly measure the displacement of the shaft of the stepper motor. Its angular resolution is 0.08789°/bit, so if you use it with a stepper motor that has a 1.8° angular resolution, you can use the motor up to 3200 step/turn microstepping and still get decent numbers.
Please don't forget to subscribe if you like the content!
If you want to support my work, please consider buying the parts using my affiliate links:
Please don't forget to subscribe if you like the content!
If you want to support my work, please consider buying the parts using my affiliate links:
 0:48:18
0:48:18
AS5600 magnetic position encoder - best encoder for stepper motors
 0:11:34
0:11:34
This Component solves 'All' Motor Problems?! (Motor Encoder) EB#58
 0:44:26
0:44:26
N20 miniature DC geared motor with AS5600 encoder and PID
 0:01:42
0:01:42
AS5600 Position Sensors IoT Demo Kit
 0:36:21
0:36:21
AS5048A 14-bit magnetic position encoder
 0:20:00
0:20:00
Custom AS5600 PCB for NEMA17-type stepper motors
 0:00:53
0:00:53
Cheap 3D Printed Absolute Encoder Knob #Shorts
 0:05:41
0:05:41
Magnetic rotary encoder vs stepper motor accuracy
 0:38:22
0:38:22
Measuring speed and position using the AS5600 magnetic encoder
 0:01:13
0:01:13
ams OSRAM AS5172E High-Resolution Magnetic Position Sensor | New Product Brief
 0:04:11
0:04:11
How to program the AS5600
 0:00:17
0:00:17
AS5600 magnetic encoder test on my own designed 2 stage planetary gearbox robot arm actuator
 0:03:01
0:03:01
Inexpensive Robot Feedback on stepper motors with AS5600 Magnetic Encoder
 0:00:22
0:00:22
AS5600 et TCA9548
 0:03:27
0:03:27
A great cheap encoder -- the AS5600
 0:05:57
0:05:57
How to programs encoder AS5600
 0:17:24
0:17:24
Overengineered 'potentiometer' using the AS5600 magnetic encoder
 0:01:08
0:01:08
step motor with as5600 encoder testing
 0:44:38
0:44:38
AS5600 Magnetic encoder - A practical example
 0:00:24
0:00:24
DIY magnetic encoder
 0:01:23
0:01:23
AS5600 Robot Position Encoder 12Bit Testing with Arduino source
 0:07:29
0:07:29
AS5600 Magnetic Rotary Encoder with analog output
 0:01:30
0:01:30
Open-Source Inverted Pendulum | Grove - 12-bit Magnetic Rotary Position Sensor / Encoder (AS5600)
 0:06:08
0:06:08
AS5600 Magnetic Encoder Installation & Coding
Комментарии