filmov
tv
Modern Robotics, Chapter 13.3.1: Modeling of Nonholonomic Wheeled Mobile Robots

Показать описание
This video introduces kinematic modeling of nonholonomic wheeled mobile robots and a single canonical model for car-like, diff-drive, and unicycle robots.
This video is a brief summary of material from the book, and it is not meant to stand alone. For more details, such as an explanation of the notation, please consult the book and the other videos.
 0:05:01
0:05:01
Modern Robotics, Chapter 13.3.1: Modeling of Nonholonomic Wheeled Mobile Robots
 0:06:03
0:06:03
Modern Robotics, Chapter 13.2: Omnidirectional Wheeled Mobile Robots (Part 1 of 2)
 0:05:03
0:05:03
Modern Robotics, Chapter 13.3.3: Motion Planning for Nonholonomic Mobile Robots
 0:06:29
0:06:29
Modern Robotics, Chapter 13.3.2: Controllability of Wheeled Mobile Robots (Part 2 of 4)
 0:02:11
0:02:11
Modern Robotics, Chapter 13.1: Wheeled Mobile Robots
 0:04:08
0:04:08
Modern Robotics, Chapter 13.3.2: Controllability of Wheeled Mobile Robots (Part 1 of 4)
 0:00:12
0:00:12
Air hostesses trying to close door 😅 #shorts
 0:05:39
0:05:39
Modern Robotics, Chapter 13.3.2: Controllability of Wheeled Mobile Robots (Part 3 of 4)
 0:55:16
0:55:16
Modern Robotics 13th Lecture
 0:04:33
0:04:33
Modern Robotics, Chapter 13.4: Odometry
 0:05:41
0:05:41
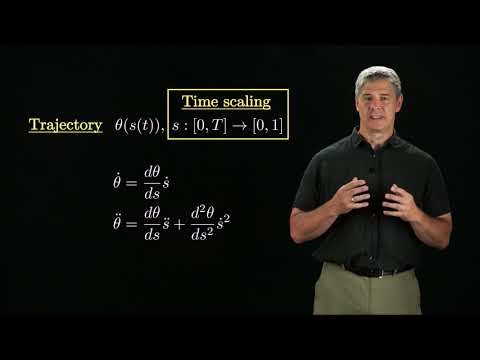
Modern Robotics, Chapters 9.1 and 9.2: Point-to-Point Trajectories (Part 1 of 2)
 0:03:01
0:03:01
Modern Robotics, Chapter 13.2: Omnidirectional Wheeled Mobile Robots (Part 2 of 2)
 0:05:43
0:05:43
Modern Robotics, Chapter 13.3.4: Feedback Control for Nonholonomic Mobile Robots
 0:06:03
0:06:03
Modern Robotics, Chapter 11.3: Motion Control with Velocity Inputs (Part 2 of 3)
 0:00:57
0:00:57
Can you solve this 150 years old puzzle? #shorts
 1:28:02
1:28:02
Lecture 3. Kinematic models of wheeled robots. Probabilistic motion models
 0:00:40
0:00:40
the Vecna transformation is 🤯 #shorts #strangerthings #netflix
 0:17:54
0:17:54
Modern Robotics 1st Lecture
 0:05:27
0:05:27
Modern Robotics, Chapter 13.3.2: Controllability of Wheeled Mobile Robots (Part 4 of 4)
 0:00:16
0:00:16
😍Kareena kapoor. (Old age.To.Young) #shorts #kareenakapoor #bollywood #old #young ##youtubeshorts
 0:00:13
0:00:13
Omni-directional robot movement
 0:06:13
0:06:13
Modern Robotics, Chapter 8.2: Dynamics of a Single Rigid Body (Part 1 of 2)
 0:02:32
0:02:32
Atomic structure model project | Atomic structure model 3d | Atomic structure model making | DIY
 0:39:16
0:39:16
Modern Robotics 27th Lecture
Комментарии