filmov
tv
Exploring Control Lyapunov Functions: Solved Exercise

Показать описание
In this video, we'll explore the application of Lasalle's Theorem and Lyapunov's Theorem in designing nonlinear controllers, ensuring global asymptotic stability of the system.
In addition to that, we will learn how to check the positive definiteness of quadratic functions and determining whether a function qualifies as a Control Lyapunov Function (CLF).
In addition to that, we will learn how to check the positive definiteness of quadratic functions and determining whether a function qualifies as a Control Lyapunov Function (CLF).
 0:18:56
0:18:56
Exploring Control Lyapunov Functions: Solved Exercise
 1:09:46
1:09:46
AppM Lecture 22 Stability of ODE equilibria in Lyapunov sense
 0:02:09
0:02:09
Maximal Taylor Neural Lyapunov Functions: Computation and Properties
 0:53:39
0:53:39
IAIFI Colloquium: Transformers meet Lyapunov: Solving a long-standing open problem in mathematics
 0:04:59
0:04:59
Optimal Control for High-Relative-Degree Systems: RI Summer Scholar Spencer Van Koevering
 0:15:31
0:15:31
Verifying Switched System Stability With Logic
 0:02:20
0:02:20
stability of origin ex2
 0:44:43
0:44:43
Lyapunov Drift Methods for Stochastic Recursions Optimization, Reinforcement Learn Part 2
 0:01:23
0:01:23
Consider the nonlinear controlled dynamical system: X(t) = x(t) x(t) = xz(t), Xi (0) = X1o, t ≥ 0…...
 0:12:47
0:12:47
Model-based Reinforcement Learning for Optimal Feedback Control of Switched Systems
 0:11:59
0:11:59
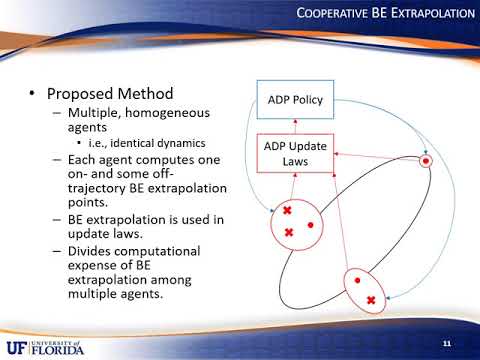
Cooperative Model-Based Reinforcement Learning for Approximate Optimal Tracking
 0:45:43
0:45:43
Stability analysis for delay systems: From steady states to hyperchaos
 0:57:26
0:57:26
Nicola Guglielmi: Approximating Lyapunov exponents of switching systems
 0:00:36
0:00:36
Prototype Adversarially Resilient Control Barrier Functions (AR-CBF)
 0:05:20
0:05:20
CoRL 2020, Spotlight Talk 171: Safe Policy Learning for Continuous Control
 0:44:32
0:44:32
MAE509 (LMIs in Control): Lecture 13, part B - LMIs for Quadratic Stability and Stabilization
 0:24:08
0:24:08
Interpretable Deep Learning for New Physics Discovery
 0:53:47
0:53:47
#47 Properties of LMIs & Delay LMIs | Linear System Theory
 0:52:32
0:52:32
Profitable, Safe, and Cybersecure Optimization-Based Control of Nonlinear Systems
 1:30:27
1:30:27
CS 159 (Spring 2021) -- Model Learning in MPC
 0:07:13
0:07:13
Practical Control for VTOL UAVs to Avoid Non-Cooperative Moving Obstacles
 0:05:35
0:05:35
Learning a CBF controller for Adaptive Cruise Control: RI Summer Scholar Emanuel Munoz
 0:13:14
0:13:14
Learning Stochastic Parametric Differentiable Predictive Control Policies
 0:02:14
0:02:14
stability of the origin ex3
Комментарии