filmov
tv
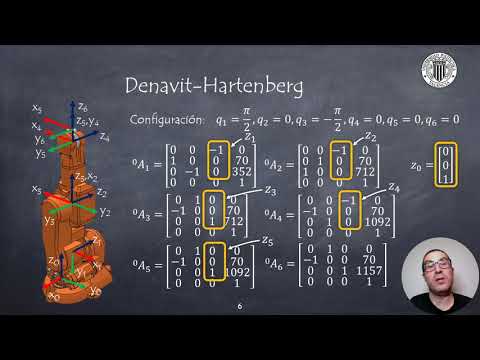
Cómo Calcular la Jacobiana de un Brazo Robot: Ejemplo Numérico | Sistemas Robotizados (ANTIGUO)
Показать описание
En este vídeo explico a través de un ejemplo, cómo calcular la matriz Jacobiana de un robot. Si quieres contribuir al desarrollo de este tipo de video tutoriales:
Nueva versión:
Código Matlab usado para el cálculo de los resultados del ejemplo:
%%%%%%%%%%%
trans=@(t) [eye(3) t;zeros(1,3) 1];
rotx=@(ang) [1 0 0 0;0 cos(ang) -sin(ang) 0;0 sin(ang) cos(ang) 0;0 0 0 1];
rotz=@(ang) [cos(ang) -sin(ang) 0 0;sin(ang) cos(ang) 0 0;0 0 1 0;0 0 0 1];
DHR=@(q,p) rotz(q(1)+p(1))*trans([0;0;p(2)])*trans([p(3);0;0])*rotx(p(4));
A01=DHR(pi/2,[0;352;70;-pi/2]);
A12=DHR(0,[-pi/2;0;360;0]);
A23=DHR(-pi/2,[0;0;0;-pi/2]);
A34=DHR(0,[0;380;0;pi/2]);
A45=DHR(0,[0;0;0;-pi/2]);
A56=DHR(0,[0;65;0;0]);
A02=A01*A12;
A03=A02*A23;
A04=A03*A34;
A05=A04*A45;
A06=A05*A56;
z0=[0;0;1];
z1=A01(1:3,3);
t1=A01(1:3,4);
z2=A02(1:3,3);
t2=A02(1:3,4);
z3=A03(1:3,3);
t3=A03(1:3,4);
z4=A04(1:3,3);
t4=A04(1:3,4);
z5=A05(1:3,3);
t5=A05(1:3,4);
t6=A06(1:3,4);
J=[cross(z0,t6) cross(z1,t6-t1) cross(z2,t6-t2) cross(z3,t6-t3) cross(z4,t6-t4) cross(z5,t6-t5);z0 z1 z2 z3 z4 z5]
rank(J)
%%%%%%
Este vídeo forma parte de un conjunto de video tutoriales usados en asignaturas de robótica de la Universitat Politècnica de València.
Nueva versión:
Código Matlab usado para el cálculo de los resultados del ejemplo:
%%%%%%%%%%%
trans=@(t) [eye(3) t;zeros(1,3) 1];
rotx=@(ang) [1 0 0 0;0 cos(ang) -sin(ang) 0;0 sin(ang) cos(ang) 0;0 0 0 1];
rotz=@(ang) [cos(ang) -sin(ang) 0 0;sin(ang) cos(ang) 0 0;0 0 1 0;0 0 0 1];
DHR=@(q,p) rotz(q(1)+p(1))*trans([0;0;p(2)])*trans([p(3);0;0])*rotx(p(4));
A01=DHR(pi/2,[0;352;70;-pi/2]);
A12=DHR(0,[-pi/2;0;360;0]);
A23=DHR(-pi/2,[0;0;0;-pi/2]);
A34=DHR(0,[0;380;0;pi/2]);
A45=DHR(0,[0;0;0;-pi/2]);
A56=DHR(0,[0;65;0;0]);
A02=A01*A12;
A03=A02*A23;
A04=A03*A34;
A05=A04*A45;
A06=A05*A56;
z0=[0;0;1];
z1=A01(1:3,3);
t1=A01(1:3,4);
z2=A02(1:3,3);
t2=A02(1:3,4);
z3=A03(1:3,3);
t3=A03(1:3,4);
z4=A04(1:3,3);
t4=A04(1:3,4);
z5=A05(1:3,3);
t5=A05(1:3,4);
t6=A06(1:3,4);
J=[cross(z0,t6) cross(z1,t6-t1) cross(z2,t6-t2) cross(z3,t6-t3) cross(z4,t6-t4) cross(z5,t6-t5);z0 z1 z2 z3 z4 z5]
rank(J)
%%%%%%
Este vídeo forma parte de un conjunto de video tutoriales usados en asignaturas de robótica de la Universitat Politècnica de València.
 0:06:12
0:06:12
 0:13:34
0:13:34
 0:26:17
0:26:17
 0:15:20
0:15:20
 0:05:46
0:05:46
 0:07:26
0:07:26
 0:07:54
0:07:54
 0:53:38
0:53:38
 0:02:20
0:02:20
 0:09:52
0:09:52
 0:21:33
0:21:33
 0:05:12
0:05:12
 0:09:36
0:09:36
 0:03:31
0:03:31
 0:00:58
0:00:58
 0:13:44
0:13:44
 0:13:52
0:13:52
 0:09:07
0:09:07
 0:07:07
0:07:07
 0:07:28
0:07:28
 0:10:35
0:10:35
 0:08:34
0:08:34
 0:13:13
0:13:13