filmov
tv
Easy Derivation of the Kalman Filter from Scratch by Using the Recursive Least Squares Method

Показать описание
#kalmanfilter #kalmanfiltertutorial #machinelearning #reinforcementlearning #machinelearningengineer #machinelearningbasics #controltheory #systemidentification #estimation #bayesian #statistics #mechanicalengineering #roboticseducation #robotics #controlengineering #pidcontrol #dynamicalsystems #datascience #stockprediction #parameterestimation #feedbackcontrol #adaptivecontrol #signalprocessing #digitalfilter #analogfilter #datasciencetutorial #adaptivefilter #adaptation #ai #electricalengineering #datafusion #covariance #statisticstutorials
It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way:
- You Can also press the Thanks YouTube Dollar button
The post accompanying this video is given here:
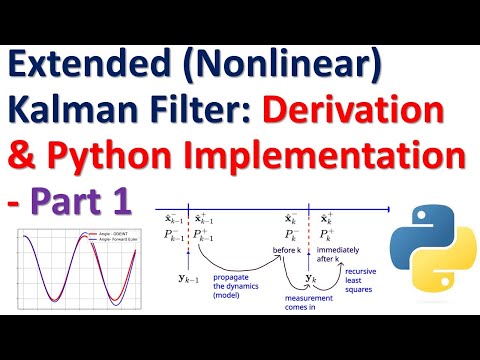
In this video tutorial and in the accompanying post, we derive the Kalman filter equations by using the recursive least squares method. We first, introduce a priori and a posteriori state estimates. We then introduce covariance matrices of estimation error. Then we explain how to propagate the mean of the state and covariance matrices over time by using the system model. Finally, we use the recursive least squares method to derive the Kalman filter equations.
It takes a significant amount of time and energy to create these free video tutorials. You can support my efforts in this way:
- You Can also press the Thanks YouTube Dollar button
The post accompanying this video is given here:
In this video tutorial and in the accompanying post, we derive the Kalman filter equations by using the recursive least squares method. We first, introduce a priori and a posteriori state estimates. We then introduce covariance matrices of estimation error. Then we explain how to propagate the mean of the state and covariance matrices over time by using the system model. Finally, we use the recursive least squares method to derive the Kalman filter equations.
 0:32:52
0:32:52
Easy Derivation of the Kalman Filter from Scratch by Using the Recursive Least Squares Method
![[Kalman Filter] Simple](https://i.ytimg.com/vi/kA-BB7b1ur8/hqdefault.jpg) 0:16:50
0:16:50
[Kalman Filter] Simple derivation of the Linear Gaussian Kalman Filter derivation
 0:06:26
0:06:26
The Kalman Filter Derived: The Power of Gaussians
 0:06:11
0:06:11
The Kalman Filter [Control Bootcamp]
 0:35:19
0:35:19
Kalman filter derivation
 0:11:16
0:11:16
Visually Explained: Kalman Filters
 1:07:12
1:07:12
How to derive the Kalman Filter equations
 0:27:31
0:27:31
Kalman Filter: Derivation
 0:11:35
0:11:35
The KALMAN FILTER Project | GT OMSCS Vlog 4
 0:09:59
0:09:59
Kalman Filter for Beginners
 0:20:15
0:20:15
4.2 Bayesian derivation of the Kalman filter
 0:16:43
0:16:43
What is the Kalman Filter?
 0:12:07
0:12:07
The Kalman Filter is BLUE
 0:09:26
0:09:26
Kalman Filter Properties
 0:28:07
0:28:07
Derivation of Extended (Nonlinear) Kalman Filter From Scratch with Python Codes - PART I - MATH
 0:34:20
0:34:20
Derivation of Recursive Least Squares Method from Scratch - Introduction to Kalman Filter
 0:09:31
0:09:31
The Unscented Kalman Filter (UKF): A Full Tutorial. PS. Sampling Methods are Amazing
 0:04:02
0:04:02
Kalman Filter - 5 Minutes with Cyrill
 0:16:57
0:16:57
What is the Kalman Filter really all about?
 0:05:56
0:05:56
Special Topics - The Kalman Filter (1 of 55) What is a Kalman Filter?
 0:22:23
0:22:23
Generating Extended Kalman Filters With Julia | Thatcher Chamberlin | JuliaCon 2023
 0:00:13
0:00:13
Kalman Filter Particle Avoidance
 1:17:05
1:17:05
Deriving Kalman filter from the view of belief propagation
 0:14:08
0:14:08
02417 Lecture 11 part C: Kalman filter
Комментарии