filmov
tv
Automate Managed Pressure Drilling (MPD)

Показать описание
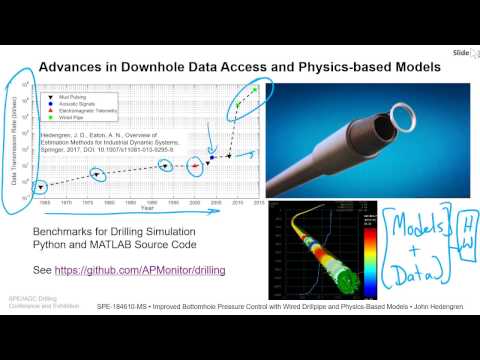
Wired Drillpipe (WDP) technology provides two-way and high speed measurements from bottom hole and along-string sensors. The data offered by WDP technology has maximum benefit when applied in an automation system or as a real-time advisory tool. Improved control is demonstrated for Managed Pressure Drilling (MPD) with the use of high-speed telemetry and physics-based models. Stabilizing and minimizing pressure within an acceptable bound leads to higher and more consistent Rate of Penetration (ROP). MPD control is challenging due to tight pressure windows and the nonlinearity of the choke and pump response on Bottom Hole Pressure (BHP). This work demonstrates a new Hammerstein-Wiener nonlinear model predictive controller for BHP regulation in drilling. Hammerstein-Wiener models employ input and output static nonlinear blocks before and after linear dynamics blocks and thereby simplify the controller design. The control performance is evaluated in scenarios such as drilling, pipe connections, and kick attenuation. A physics-based drilling simulator, WeMod, is used for model identification and control performance evaluation. The control performance of the new nonlinear controller is compared to conventional controllers in various scenarios. Because of the interconnected multivariable and nonlinear nature of the drilling operation, conventional controllers show severe limitations. In a first scenario, the performance of set point tracking during normal drilling operation is compared. By changing the set point of the BHP, the conventional controller manipulates only the choke valve opening while the nonlinear controller moves choke valve opening, mud pump, and back pressure pump simultaneously. In a second scenario, a pipe connection of a typical drillpipe stand is demonstrated. The conventional controller is not able to regulate the BHP by adjusting the choke valve only. Although a linear version of the controller is able to exploit multivariable relationships, absence of the nonlinear relationships results in severe oscillation when the operational range is shifted outside of the training region. The nonlinear controller maintains a BHP within ±1 bar of the requested set point. A third scenario investigates the kick attenuation performance of conventional and nonlinear control algorithms. The nonlinear controller attenuates the kick within well control conditions, without requiring a well shut-in procedure.
Park, J., Webber, T.R., Asgharzadeh Shishavan, R., Hedengren, J., Improved Bottomhole Pressure Control with Wired Drillpipe and Physics-Based Models, SPE-184610-MS, SPE/IADC Drilling Conference and Exhibition, The Hague, The Netherlands, 14-16 March 2017.
Park, J., Webber, T.R., Asgharzadeh Shishavan, R., Hedengren, J., Improved Bottomhole Pressure Control with Wired Drillpipe and Physics-Based Models, SPE-184610-MS, SPE/IADC Drilling Conference and Exhibition, The Hague, The Netherlands, 14-16 March 2017.
 0:24:34
0:24:34
Automate Managed Pressure Drilling (MPD)
 0:03:09
0:03:09
Automated Managed Pressure Drilling (MPD) System
 0:01:54
0:01:54
What's Managed Pressure Drilling (MPD)?
 0:49:00
0:49:00
MPD: The New Drilling Convention | MPD series webcast finale
 0:00:07
0:00:07
mpd drilling managed pressure drilling
 0:22:49
0:22:49
Managed Pressure Drilling Automation: Challenges and Opportunities
 0:16:18
0:16:18
Ensemble Control of Managed Pressure Drilling
 0:04:13
0:04:13
MPowerD Managed Pressure Drilling System - Deepwater
 0:03:05
0:03:05
Deepwater Managed Pressure Drilling (MPD) Rig Integration
 0:01:09
0:01:09
Weatherford launches Victus Intelligent managed pressure drilling
 0:03:38
0:03:38
WEI Managed Pressure Drilling MPD
 0:03:33
0:03:33
Managed Pressure Wells with Rudy Flores
 0:01:31
0:01:31
FLEX™ Managed Pressure Drilling
 0:01:14
0:01:14
Managed Pressure Drilling IOL program
 0:02:40
0:02:40
MPowerD Advanced Managed Pressure Drilling System with Integrated Control System
 0:15:32
0:15:32
MPD Training Simulator Connection Practise
 0:01:56
0:01:56
Managed Pressure Drilling
 0:00:23
0:00:23
mpd drilling managed pressure drilling
 0:56:40
0:56:40
Land: Safer, Faster, Smarter | MPD series webcast 3 of 4
 0:02:11
0:02:11
Halliburton Releases New Scalable Managed Pressure Drilling System
 0:22:17
0:22:17
Automation of Managed Pressure Drilling
 0:09:18
0:09:18
Level - 1 Managed Pressure Drilling Analysis - Workout your MPD MW, SACP & ECD/BHCP
 0:40:41
0:40:41
NOV Live | Managed Pressure Drilling with Dwayne Barnwell
 3:14:12
3:14:12
Gibson Reports Virtual MPD: Don’t Crack Under the Managed Pressure Drilling Sponsored By Pruitt
Комментарии