filmov
tv
Controlling a Raspberry Pi robot using a BBC micro:bit

Показать описание
Showing how the accelerometer on the micro:bit can be used to send information to a Raspberry Pi computer to control a robot. The communication between the micro:bit and the host computer is done using pyserial with MicroPython on the micro:bit and python on the Raspberry Pi and on the robot.
 0:25:56
0:25:56
The Ultimate Guide to using Motors in Robotics (including ROS, Raspberry Pi)
 0:03:23
0:03:23
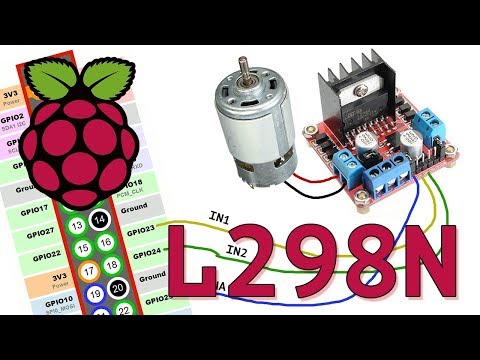
Raspberry Pi How to Control a DC Motor With an L298N Driver
 0:11:39
0:11:39
Raspberry Pi 4 Driving a DIY Rover Using a PS4 Controller | RC Robot
 0:00:13
0:00:13
PiArm: Pick and Place Robotic Arm for Raspberry Pi
 0:00:39
0:00:39
Robot Programming with Raspberry Pi - RoboDK
 0:00:13
0:00:13
Raspberry Pi Robot - Controlled from an Xbox controller
 0:00:21
0:00:21
ArmPi Pro declares: 'I've got your every move locked down😎👀'👉 http://bit.ly/3wU9tzh...
 0:04:37
0:04:37
Raspberry Pi with DC Motors | Full Tutorial
![[Easily Understand] PWM](https://i.ytimg.com/vi/1W7323c7YTE/hqdefault.jpg) 0:04:48
0:04:48
[Easily Understand] PWM Explained | What is Pulse Width Modulation?
 0:19:53
0:19:53
Raspberry Pi Devastator Robot #4: Pygame & Speed Control
 0:14:20
0:14:20
Build a Raspberry Pi RC Tank driven by an 8BitDo Controller - GoBILDA Outlaw Chassis Kit Assembly
 0:17:56
0:17:56
Raspberry Pi Pico W: WiFi Controlled Robot
 0:22:30
0:22:30
How to Build Your First Robot With a Raspberry Pi and Program it in Python - Step by Step Tutorial
 0:00:12
0:00:12
Raspberry Pi with Python & GPIO Zero! #ConfedIMD
 0:07:50
0:07:50
12 New AI Projects using Raspberry-Pi, Jetson Nano & more
 0:12:23
0:12:23
OWI Edge Maplin USB Robot Arm With Raspberry Pi
 0:01:24
0:01:24
TurboPi Raspberry Pi Omnidirectional Mecanum Wheels Robot Car Kit
 0:07:40
0:07:40
How To Control A Standard Servo With Raspberry Pi
 0:00:19
0:00:19
Setting Up a Raspberry Pi 4 | Vilros
 0:00:13
0:00:13
Raspberry Pi Pico 2 & SunFouder Controller #maker #iot
 0:00:25
0:00:25
Raspberry Pi 4 with four Raspberry Pi Zero 2W. PoE powered #raspberrypi #hardware #diyelectronics
 0:18:48
0:18:48
This mini GPU runs LLM that controls this robot
 0:02:00
0:02:00
Controlling a Raspberry Pi robot using a BBC micro:bit
 0:15:24
0:15:24
I put ChatGPT on a Robot and let it explore the world
Комментарии