filmov
tv
A Strange But Elegant Approach to a Surprisingly Hard Problem (GJK Algorithm)
Показать описание
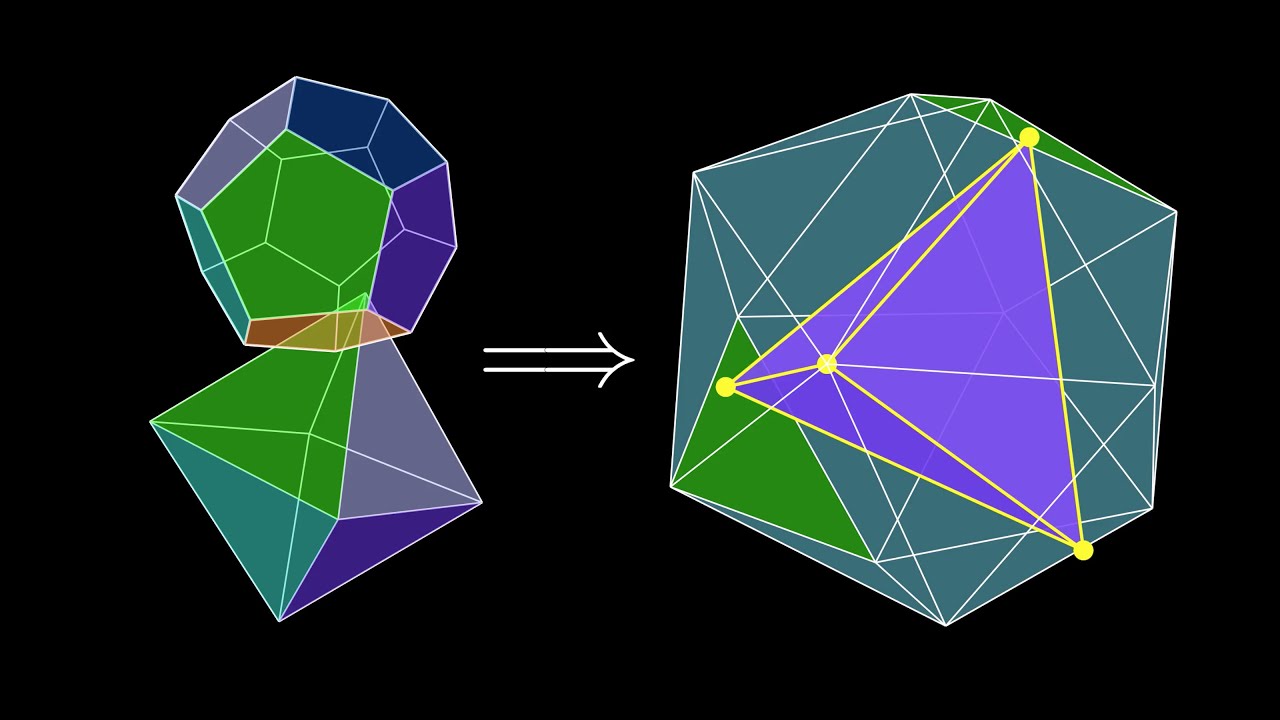
In 1988, three engineers came together and developed one of the most clever solutions to the problem of detecting when two complex objects collide. Their solution, the Gilbert Johnson Keerthi (GJK) algorithm, named after the authors, made an incredible impact in the fields of robotics, control, and computer graphics. This video is about understanding this ingenious algorithm from first principles.
The video covers a broad range of topics from Minkowski sums and differences to support functions to the full implementation of the 2D GJK algorithm. But what I hope you get out of this is an appreciation of the incredible shifts in perspective that lead to the final algorithm. Coming up with the algorithm is an amazing feat and useful for specific applications, but the overarching problem solving techniques that come through in the journey to the solution is truly invaluable.
0:00 Introducing the Problem
2:02 Convexity
3:15 Infinite Point Perspective
4:07 Minkowski Sums and Differences
6:37 Triangles inside Minkowski Differences
7:41 Simplexes
8:57 Support Functions
13:05 Core GJK Algorithm: Broad Perspective
17:15 Remaining Key Questions
17:56 How to determine if a point passed the origin?
19:10 The line case
20:41 The triangle case
26:25 GJK Implementation
29:38 Recap and quick note about original GJK paper
This video is supported by a community of Patreons
Special Thanks to the following Patreons:
Burt Humburg
Justin Hiester
Michael Nawenstein
Richard Wells
Sebastian Gamboa
Zac Landis
There's a lot more to the GJK algorithm to learn for those interested. Here are some resources I recommend:
Music attributions:
All other tracks by Aakash Gandhi
The video covers a broad range of topics from Minkowski sums and differences to support functions to the full implementation of the 2D GJK algorithm. But what I hope you get out of this is an appreciation of the incredible shifts in perspective that lead to the final algorithm. Coming up with the algorithm is an amazing feat and useful for specific applications, but the overarching problem solving techniques that come through in the journey to the solution is truly invaluable.
0:00 Introducing the Problem
2:02 Convexity
3:15 Infinite Point Perspective
4:07 Minkowski Sums and Differences
6:37 Triangles inside Minkowski Differences
7:41 Simplexes
8:57 Support Functions
13:05 Core GJK Algorithm: Broad Perspective
17:15 Remaining Key Questions
17:56 How to determine if a point passed the origin?
19:10 The line case
20:41 The triangle case
26:25 GJK Implementation
29:38 Recap and quick note about original GJK paper
This video is supported by a community of Patreons
Special Thanks to the following Patreons:
Burt Humburg
Justin Hiester
Michael Nawenstein
Richard Wells
Sebastian Gamboa
Zac Landis
There's a lot more to the GJK algorithm to learn for those interested. Here are some resources I recommend:
Music attributions:
All other tracks by Aakash Gandhi
 0:31:53
0:31:53
A Strange But Elegant Approach to a Surprisingly Hard Problem (GJK Algorithm)
 0:37:03
0:37:03
Something Strange Happens When You Follow Einstein's Math
 0:05:15
0:05:15
Super Rare Opening... But It's Actually Good | Chess Opening
 0:00:16
0:00:16
Smart Appliances! New Gadgets, Versatile Utensils, Tool Items #shorts #gadgets
 0:04:13
0:04:13
If A Guy Asks These 7 Questions, He’s Very Attracted To You!
 0:12:29
0:12:29
3 Feminine Habits Men Find WILDLY Attractive (Make His Heart RACE with Naturally Seductive Behavior)
 0:26:13
0:26:13
A Systems-Minded Approach to Creating a Music Player Application by Andrew Kelley
 0:00:19
0:00:19
I like this method friends,what a smart tools #funny #doctorlove
 0:28:00
0:28:00
How Computers Draw Weird Shapes (Marching Squares)
 0:00:58
0:00:58
3 Studying Tips You Haven't Heard Of
 0:00:20
0:00:20
This Car Cleaning Method Is Too Satisfying #car #satisfying #smart #funny #memes #usa #clean #viral
 0:00:22
0:00:22
Budha Joke - Elegant Approach: Handing weight gain 😂😂😂 #funny #funnyvideo #humor #short #budha...
 0:14:04
0:14:04
Inside the Mind of a Master Procrastinator | Tim Urban | TED
 0:03:58
0:03:58
'THIS' Is How to Tell If She Wants You to Approach | 2 Types of Eye Contact Decoded & ...
 0:10:11
0:10:11
Weird Habits Only Smart People Have - How Highly Intelligent People Do Things Uniquely (Psychology)
 0:09:27
0:09:27
3 Things Men Do When They Are Highly Attracted To You | Dating Advice for Women by Mat Boggs
 0:00:15
0:00:15
Smart appliances - new gadgets, versatile utensils, tool items #gadgets #shorts pt 60
 0:00:45
0:00:45
2 Ingredient Chocolate Truffle
 0:01:00
0:01:00
Smart Cat vs Water Spray Repellent #funny
 0:00:19
0:00:19
Smart Dog Funny Moment | Smart dog are cute and funny |smart dog funny #shorts #animalcare #cutedog
 0:17:29
0:17:29
Film Theory: 5 Post-Multiverse of Madness Theories (Doctor Strange)
 0:00:21
0:00:21
He’s too smart💀😂 #shorts #viral #trending #comedy #funny
 3:01:55
3:01:55
101 Random Facts to Keep Your Next Conversation Going
 0:01:01
0:01:01
Funny and Crazy Smart Cats 😂😂😂😂😂😂😂😂 #shorts
Комментарии