filmov
tv
Micro Servo Robot
Показать описание
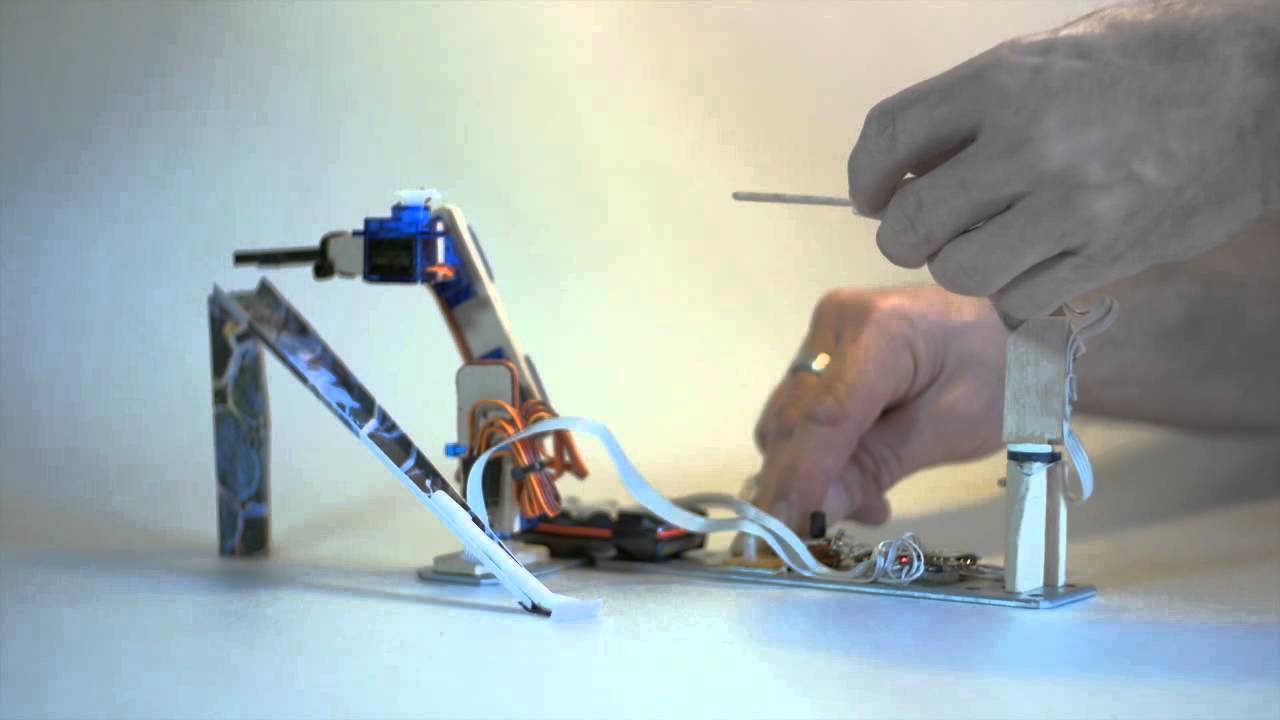
4 axis robot arm with a small gripper and teach function. (In fact: it is a 3 axis robot)
- please read the full description before ask questions which are already answered -
Arduino mini pro 5V (Uno, Nano .. what ever...)
4 * micro servos 180degrees
4 * 22k potentiometer (10K is okey!)
NmH Battery 4.8V (The Arduino cannot power the servos)
Wires, Button, Switch
Balsa wood, Metal, Plastic
Zip Ties and Glue
Teach mode: After a reset the robot arm follows the teach in arm while simple mapping the analog inputs every 25ms to the servo motors. Pressing the button stores each servo position in a array.
Play mode: The sketch reads the array step by step and and moves the robot arm. For cool loocking movements i added a routine calculates different micro steps for each servo to have moving start and end sync on all axis. Also added a ramp for soft increase/decrease velocity. Shorter travel distances the robot does slow, longer distances with faster speed.
Play Mode version 1.1 The gripper input is used to set the delay (0,1,3,15,60,300 seconds) after a loop is done. The switch (it was left from the project start) pauses the robot.
Music: Ticon - Don't Tell Me I Sing Like A Robot
- please read the full description before ask questions which are already answered -
Arduino mini pro 5V (Uno, Nano .. what ever...)
4 * micro servos 180degrees
4 * 22k potentiometer (10K is okey!)
NmH Battery 4.8V (The Arduino cannot power the servos)
Wires, Button, Switch
Balsa wood, Metal, Plastic
Zip Ties and Glue
Teach mode: After a reset the robot arm follows the teach in arm while simple mapping the analog inputs every 25ms to the servo motors. Pressing the button stores each servo position in a array.
Play mode: The sketch reads the array step by step and and moves the robot arm. For cool loocking movements i added a routine calculates different micro steps for each servo to have moving start and end sync on all axis. Also added a ramp for soft increase/decrease velocity. Shorter travel distances the robot does slow, longer distances with faster speed.
Play Mode version 1.1 The gripper input is used to set the delay (0,1,3,15,60,300 seconds) after a loop is done. The switch (it was left from the project start) pauses the robot.
Music: Ticon - Don't Tell Me I Sing Like A Robot
 0:01:40
0:01:40
Micro Servo Robot
 0:00:28
0:00:28
Arduino DIY MeArm 4DOF Wooden Robotics Robot Arm Kit + SG90 / MG90s Servo Motor
 0:10:26
0:10:26
Mini Robotic Arm with Arduino - Save/Play Positions.
 0:00:17
0:00:17
6-DOF all-metal robot arm with MG996R servos
 0:01:36
0:01:36
Torque Servo Robot Arm
 0:01:48
0:01:48
xArm ESP32 Bus Servo Robotic Arm Powered by Open-source ESP32 Python Programmable Robot
 0:04:15
0:04:15
Quick Guide to Servos
 0:00:06
0:00:06
bipedal robot micro servo SG90 by tower pro (pinoy)
 0:00:46
0:00:46
6-Axis Servo Robot Arm
 0:00:58
0:00:58
Microbit XGO Robot: used for micro servo
 0:00:50
0:00:50
jBot Q1 mini Quadruped Robot (Designed by Jason Workshop)
 0:06:15
0:06:15
Miuzei Servo Review - WARNING! Don't Buy Servos Before Watching This - The Best Cheap Servo
 0:00:28
0:00:28
Micro Servo Robot movements
 0:01:19
0:01:19
RC Biped Robot with Arduino and SG90 Servo
 0:02:45
0:02:45
Arduino Xbee Servo Robot
 0:03:19
0:03:19
Curious Arm (SG90 Servo Robotic Arm) Demo
 0:08:00
0:08:00
How to Make Servo Robotic Arm using Arduino.
 0:01:17
0:01:17
xArm 1S Hiwonder Intelligent Bus Servo Robotic Arm for Programming
 0:00:40
0:00:40
AGFrc C1.5CLS 1.5g Ultra micro linear servo for small rc planes, robots
 0:00:30
0:00:30
Comparison of Robot Digital Servo and Micro Servo Motor
 0:08:26
0:08:26
How to make Micro Servo Robotic arm arduino based simple DIY
 0:04:27
0:04:27
Best 10 Open Source SG90 Micro Servo Motor Projects
 0:08:13
0:08:13
Record & play micro servo robotic Arm
 0:00:25
0:00:25
TinyCircuits Servo Robot
Комментарии