filmov
tv
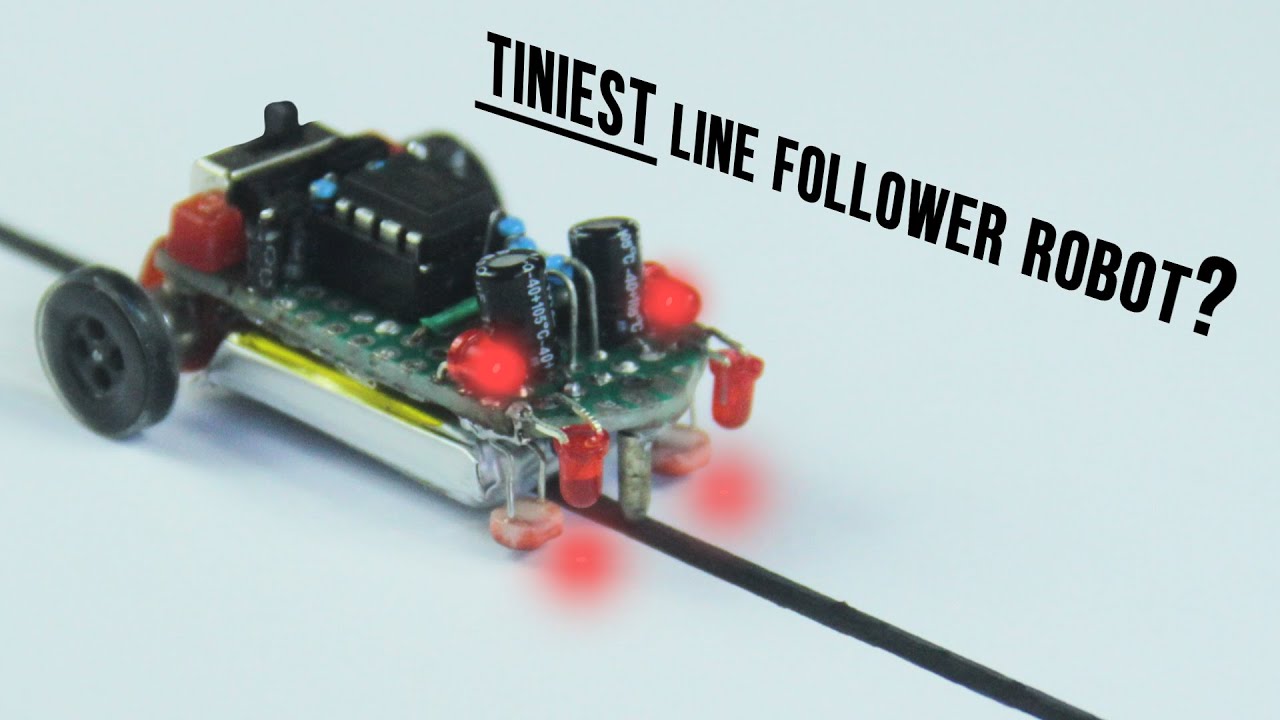
Make the TINIEST Line Follower Robot without a Microcontroller!
Показать описание
------------------------------------------------------------------
In this step-by-step guide, I’ll demonstrate how to build an incredibly small yet efficient line-following robot using basic electronics. No microcontroller or programming skills required! 🤖🔌
What to Expect:
➡️ Tiny Form Factor: Discover how to create a compact robot that fits in the palm of your hand.
➡️ Precise Line Tracking: Watch as our two-wheeled wonder follows electrical tape lines with remarkable accuracy.
➡️ Budget-Friendly Components: Learn which readily available components you’ll need to assemble this mini marvel.
➡️ Logic Circuit Insights: Learn to use Op Amp logic for its operation without relying on a microcontroller.
➡️ IR Sensors and Motors: Dive into the world of infrared and light-sensitive sensors, comparators, and motor drivers.
➡️ Fun and Educational: Whether you’re a beginner or an electronics enthusiast, this project offers valuable insights into robotics.
Get ready to embark on this fascinating journey of building miniaturized robots! Hit that subscribe button and join me as we make the tiniest line follower robot a reality. 🚀🎉
PROJECT RESOURCES:
🔩 Materials and parts required:
#linefollower #diyrobot #minirobots
Music from #Uppbeat
License code: 9NVIYKB9KKBYAWYY
(As an Amazon Associate, I earn from qualifying purchases with no added cost to you. It helps me make more of these videos, thanks!)
----------------------------------------------------------------------
----------------------------------------------------------------------
----------------------------------------------------------------------
Keywords:
Line follower robot, Fast Line Follower Robot, DIY, Arduino line follower, No microcontroller, no code, line follower circuit, simple, cheap, No Arduino, DIY robot project, Ultra-compact design, Two-wheeled robot, Electrical tape lines, Precise line tracking, Budget, Basic electronics tutorial, Motor drivers, Miniature robotics, Mini robot, Line-following algorithm, Line-following mechanism, High Precision Line-follower, Line-following experiment, Line-following setup, Line-following components, Line-following calibration, Line-following speed, Line-following accuracy, Line-following tips, Line-following tricks, Line-following techniques, Line-following innovation, STEM robotics, Hobby robotics, Maker community, Electronics, Robotics tutorial, DIY tech projects, Educational robotics, Low-cost robotics, Creative engineering, Fun robotics experiments, Robotics hobbyist, Robotics workshop, Robotics DIY, Hands-on robotics
#linefollower #diyrobot #minirobots #uppbeat
DISCLAIMER: This video and description contains affiliate links, which means that if you click on one of the product links, I will receive a small commission with no additional cost to you. This helps support this channel and allows me to continue to make videos like this. Thank you for your support!
 0:11:34
0:11:34
Make the TINIEST Line Follower Robot without a Microcontroller!
 0:00:22
0:00:22
HBFS Line Follower - Next Generation of Robots
 0:00:20
0:00:20
Tiniest DIY Line Follower Robot without microcontroller #linefollowerrobot #electronicsprojects
 0:10:02
0:10:02
I made a SUPER FAST Line Follower Robot Using PID!
 0:00:24
0:00:24
Very Fast High Precision Robot Line Follower Using STM32
 0:00:12
0:00:12
PID Fast Line Follower Robot using 5 Channel IR Sensor Array #linefollowingrobot
 0:00:29
0:00:29
Fast line follower Robot
 0:00:29
0:00:29
How to Make Arduino PID LINE FOLLOWER #linefollower #arduino #electronics
 0:02:13
0:02:13
Printing a Line Following Robot Control Board with Silver Ink on FR1 | Additive PCB Prototyping
 0:00:18
0:00:18
Super Fast Line Follower Robot #diy #electronic #engineering #robot #robotics
 0:05:49
0:05:49
How to Make Line Follower Robot
 0:00:21
0:00:21
how to make a line following car without Arduino uno
 0:00:51
0:00:51
Custom made line map - With a tiny little line follower robot
 0:05:51
0:05:51
How To Make A DIY Arduino Line Follower Car At Home
 0:14:13
0:14:13
DIY Line Follower Robot without Microcontroller | Home Made Line Follower
 0:00:29
0:00:29
EV3 ultra-fast line following (Large motor + Tiny wheels)(+code)
 0:06:54
0:06:54
How to code your Line follower robot with PID control and working code!
 0:00:16
0:00:16
Obstacle Avoiding Car using Ultrasonic sensor | Path Finder Robot
 0:00:19
0:00:19
colours sensor ev3 robot line follower coding with micro python
 0:14:56
0:14:56
Simple Line Follower Robot Making
 0:07:32
0:07:32
Line following robot without arduino || White line follower robot
 0:15:14
0:15:14
How to Make Line Follower Robot without Microcontroller | Line follower Sensor Robot DIY Projects
 0:00:22
0:00:22
Very fast Small Line Follower, about 1,40 m/sec. on strong path
 0:01:57
0:01:57
Technoxian Presents Thrilling Fastest Line Follower Glimpses| Technoxian World Cup 2023
Комментарии