filmov
tv
Differential Geometry: Lecture 15 part 1: Shape Operator Defined
Показать описание
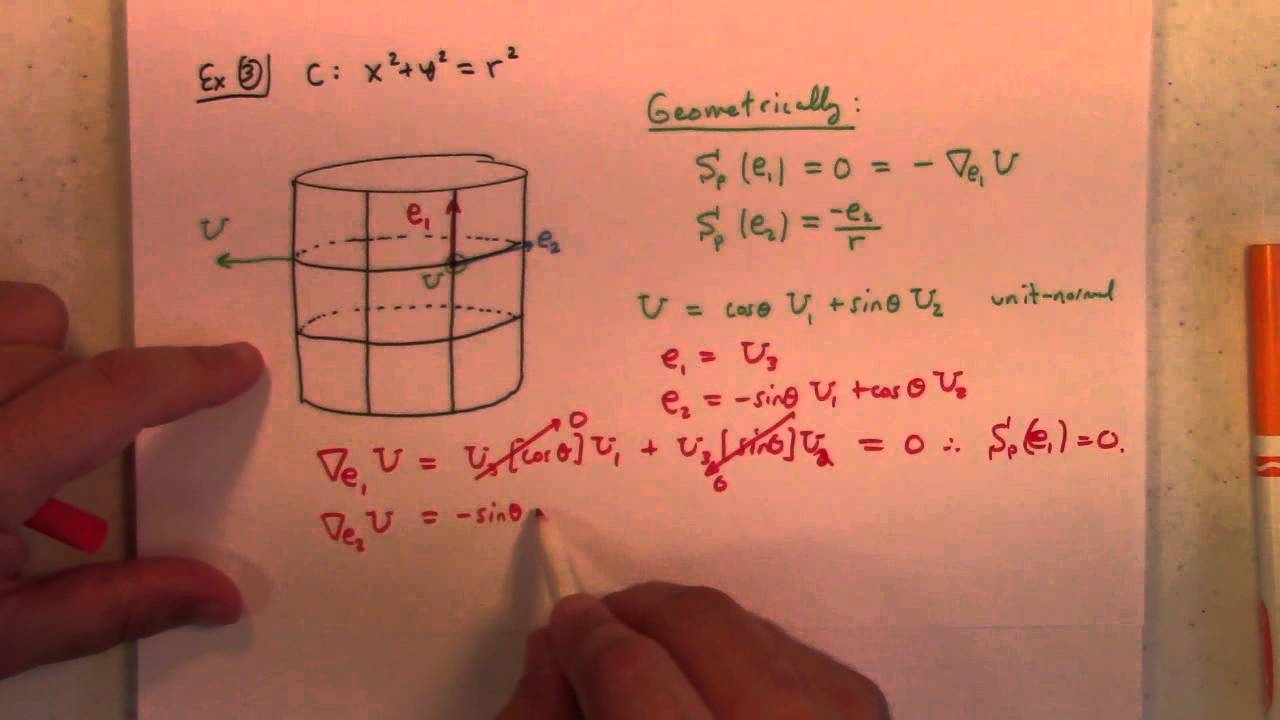
Here we define the shape operator for a surface in R3. Several examples are given, but keep in mind the real computational machinery is given in the next lecture.
 0:35:05
0:35:05
Differential Geometry: Lecture 15 part 2: normal curvature
 0:41:05
0:41:05
Differential Geometry: Lecture 15 part 1: Shape Operator Defined
 0:38:50
0:38:50
Differential Geometry: Lecture 15 part 3: Gaussian and Mean curvature
 1:17:53
1:17:53
Introduction to differential geometry - Lecture 15 - Prof. Alan Huckleberry
 1:09:29
1:09:29
Differential Geometry (MTH-DG) Lecture 15
 0:16:38
0:16:38
Differential geometry lecture 15
 1:15:16
1:15:16
Lecture 15: Isometries, Rigidity, and Curvature
 0:13:37
0:13:37
Differential Geometry in Under 15 Minutes
 0:07:50
0:07:50
How to Approach Tough Definite Integration Problems for JEE Advanced - Part 1
 0:35:33
0:35:33
TORSION || The Theory of Space Curve || Differential Geometry || Lecture -15
 0:20:43
0:20:43
Lecture 15: Differential Geometry
 2:34:10
2:34:10
Differential geometry and topology in physics: Lecture 15
 0:00:35
0:00:35
How REAL Men Integrate Functions
 0:00:37
0:00:37
When mathematicians get bored (ep1)
 0:43:03
0:43:03
Differential Geometry: Lecture 21 part 1: orthogonal patches and Gaussian Curvature
 0:25:09
0:25:09
How to learn differential geometry | Differential geometry lecture | Differential gometry
 0:53:32
0:53:32
Differential geometry | How to learn differential geometry | Differential geometry lecture video
 0:00:19
0:00:19
Beauty of the Brain😍 IQ - IIT Bombay
 0:51:21
0:51:21
Differential geometry | Differential geometry lecture video | Differential geometry lecture series
 0:00:16
0:00:16
Differential geometry M.sc Sem 2 maths #MDSUPAPER
 0:10:31
0:10:31
Analysis II Lecture 15 Part 2 flows on manifolds
 0:23:35
0:23:35
Differential Geometry: Lecture 20 part 2: Gauss' Awesome Theorem
 0:53:34
0:53:34
Math371-15 - Differential Geometry of Curves and Surfaces
 0:19:05
0:19:05
Lecture 15 (Part 1): Review of Cartan's First structure equations & exampls; 2nd structure ...
Комментарии