filmov
tv
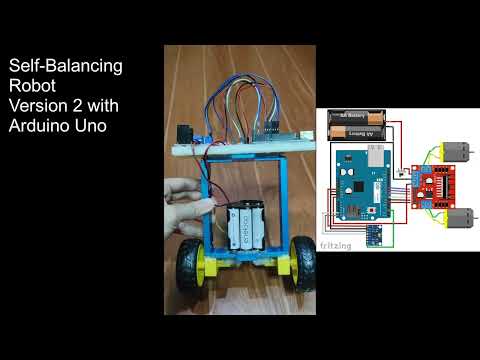
Balancing Robot, Arduino Uno, L298n, MPU6050.

Показать описание
Good starting point for anyone wanting to build a balancing robot. This robot uses servo converted to continuous rotation and with the electronics removed to basically get a convenient motor and gearbox unit which is easy to mount. These servo (motors) are driven from a L298n Dual "H" bridge motor driver board. The control is handled by a Arduino UNO which receives readings from the MPU6050 which is a combined accelerometer and gyro. The two cell LiPo (5000mah) battery is held on top via a velcro strap. it provides power to the motor driver board which in turn supplies 5 volts to the Arduino UNO via its own 5 volt regulator.
If you want more details visit my instructables page at the following.
If you want more details visit my instructables page at the following.
 0:02:54
0:02:54
Balancing Robot, Arduino Uno, L298n, MPU6050.
 0:13:37
0:13:37
How to make a Self Balancing Robot Car Using Arduino Compatible Uno R3, L298N driver and MPU6050
 0:07:54
0:07:54
Ultimate Guide to Make Self Balancing Robot for Beginner - ICStation.com
 0:00:13
0:00:13
Self Balancing Robot using Arduino and MPU 6050 #selfbalancing #arduinoproject
 0:00:39
0:00:39
Part 1 - 2 Wheeled Self Balancing bot Arduino Uno L298N Motor Driver GY-521 MPU-6050
 0:00:29
0:00:29
two-wheel self balancing robot using arduino uno + MPU6050 + L298N
 0:00:28
0:00:28
Part 2 - 2 Wheeled Self Balancing bot Arduino Uno L298N Motor Driver GY-521 MPU-6050
 0:07:08
0:07:08
Self Balancing Robot using Arduino & MPU 6050 || Step by step Tutorial #arduinoproject
 0:00:48
0:00:48
Self-Balance Robot with Uno or Nano using MPU6050 and L298N
 0:29:35
0:29:35
Build a Self-Balancing Robot with Arduino for Beginners
 0:01:44
0:01:44
First run of balancing bot using Arduino , L298 and MPU6050
 0:00:25
0:00:25
Self Balancing Robot with PID Controller + Arduino uno + L298 motor driver
 0:00:38
0:00:38
Robot Balancing Arduino Uno + Bluetooth + L298N
 0:00:27
0:00:27
How to make Self Balancing Robot Car Using Arduino Uno , L298N driver and MPU6050 | #shorts #diy
 0:03:22
0:03:22
Self balancing robot || arduino UNO R3 || TT GEAR
 0:05:14
0:05:14
Arduino Balance Bot L298N Mpu6050
 0:01:13
0:01:13
Self Balancing Robot Project using Arduino, MPU-6050, and L298N | Part-1
 0:00:29
0:00:29
making self balancing robot.body is 3d printed ,mpu6050, Arduino uno,l298n driver#selfbalancingrobot
 0:05:38
0:05:38
Self Balancing Robot Project using Arduino, MPU-6050, and L298N | Part-2
 0:01:43
0:01:43
Self balancing Robot with Arduino and L298N - My first attempt :)
 0:00:55
0:00:55
Self—balance robot
 0:00:41
0:00:41
2 wheel balancing robot using DC motor
 0:01:03
0:01:03
Testing my Arduino self balancing robot using a PID controller
 0:08:15
0:08:15
How to make self balancing robot
Комментарии