filmov
tv
Introduction To Second Order Linear Homogeneous Differential Equation

Показать описание
Second-Order Homogeneous Equations
A second Order Differentiatial Equation is an equation whose highest derivative is that of second derivative.
A second order Linear Differentiatial Equation is of the form;
A(x)y" + B(x)y' + C(x)y = D(x) and it is said to be Homogeneous if D(x)=0
The first form we will look onto is when we have constant coefficients instead of functions of x. i.e ay"+by'+cy=0
Now our approach to solving an equation of the above type: we guess a solution. Of course, its an educated guess, there’s a lot of maths behind why we make the guess we do, but essentially it boils down to attempting a solution of the form y=eʳˣ. Here, r is simply an unknown constant, and our aim becomes to find r for which a solution of this type satisfies the differential equation. Now, our guess implies that:
dy/dt=reʳˣ, d²y/dt²=r²eʳˣ,
and we can therefore substitute into our differential equation to find:
ar²eʳˣ+breʳˣ+ceʳˣ=0.
Now because eʳˣ is never zero, its safe to divide through to acquire a quadratic in r:
ar²+br+c=0.
This equation, which in future you can jump to straight away, is usually called the Auxiliary Equation or characteristics Equation.
But we know how to solve quadratics! This means we can find the r for our a, b and c that allow eʳˣ to satisfy our differential equation. Now, in general we’ll actually have 2 values for r and our most general solution to the differential equation will be a linear combination of the two solutions they imply. Therefore, if we call our two solutions m1 and m2 we have:
y=C₁eᵐ¹ˣ+C₂eᵐ²ˣ.
But what happens if m1=m2? Well then instead we use:
y=(C₁+C₂x)eᵐˣ.
Additionally, it’s important to realise that our r may not necessarily be real numbers. If they happen to be complex, we could call our two solutions r1=m+sι and r2=m-sι, since they’ll always be complex conjugate pairs. Then our solution for y, using the relations between eit and the trigonometric functions, can be written as:
y=eᵐˣ[C₁cos(st)+C₂sin(st)].
So these three formula we’ve ended up with are all we actually need to remember! For any homogeneous second order differential equation with constant coefficients, we simply jump to the auxiliary equation, find our r, write down the implied solution for y and then use initial conditions to help us find the constants if required.
A second Order Differentiatial Equation is an equation whose highest derivative is that of second derivative.
A second order Linear Differentiatial Equation is of the form;
A(x)y" + B(x)y' + C(x)y = D(x) and it is said to be Homogeneous if D(x)=0
The first form we will look onto is when we have constant coefficients instead of functions of x. i.e ay"+by'+cy=0
Now our approach to solving an equation of the above type: we guess a solution. Of course, its an educated guess, there’s a lot of maths behind why we make the guess we do, but essentially it boils down to attempting a solution of the form y=eʳˣ. Here, r is simply an unknown constant, and our aim becomes to find r for which a solution of this type satisfies the differential equation. Now, our guess implies that:
dy/dt=reʳˣ, d²y/dt²=r²eʳˣ,
and we can therefore substitute into our differential equation to find:
ar²eʳˣ+breʳˣ+ceʳˣ=0.
Now because eʳˣ is never zero, its safe to divide through to acquire a quadratic in r:
ar²+br+c=0.
This equation, which in future you can jump to straight away, is usually called the Auxiliary Equation or characteristics Equation.
But we know how to solve quadratics! This means we can find the r for our a, b and c that allow eʳˣ to satisfy our differential equation. Now, in general we’ll actually have 2 values for r and our most general solution to the differential equation will be a linear combination of the two solutions they imply. Therefore, if we call our two solutions m1 and m2 we have:
y=C₁eᵐ¹ˣ+C₂eᵐ²ˣ.
But what happens if m1=m2? Well then instead we use:
y=(C₁+C₂x)eᵐˣ.
Additionally, it’s important to realise that our r may not necessarily be real numbers. If they happen to be complex, we could call our two solutions r1=m+sι and r2=m-sι, since they’ll always be complex conjugate pairs. Then our solution for y, using the relations between eit and the trigonometric functions, can be written as:
y=eᵐˣ[C₁cos(st)+C₂sin(st)].
So these three formula we’ve ended up with are all we actually need to remember! For any homogeneous second order differential equation with constant coefficients, we simply jump to the auxiliary equation, find our r, write down the implied solution for y and then use initial conditions to help us find the constants if required.
 0:25:17
0:25:17
Second Order Linear Differential Equations
 0:08:25
0:08:25
Second-Order Differential Equations (Introduction)
 0:11:58
0:11:58
Introduction To Second Order Linear Homogeneous Differential Equation
 0:11:44
0:11:44
Second order homogeneous linear differential equations with constant coefficients
 0:07:06
0:07:06
Second-Order Homogeneous Equations (Constant Coefficients Introduction)
 0:11:19
0:11:19
The Theory of 2nd Order ODEs // Existence & Uniqueness, Superposition, & Linear Independence
 0:06:41
0:06:41
How to Solve Constant Coefficient Homogeneous Differential Equations
 0:11:21
0:11:21
Introduction To Second Order Linear NonHomogeneous Differential Equations
 1:13:11
1:13:11
Access your Future: An ALX Pathway Info Session.
 0:03:43
0:03:43
Differential Equation - 2nd Order Linear (1 of 17) Introduction
 0:02:37
0:02:37
Differential Equation - Introduction (15 of 16) Second Order Differential Eqn. Linear Homogeneous
 0:27:16
0:27:16
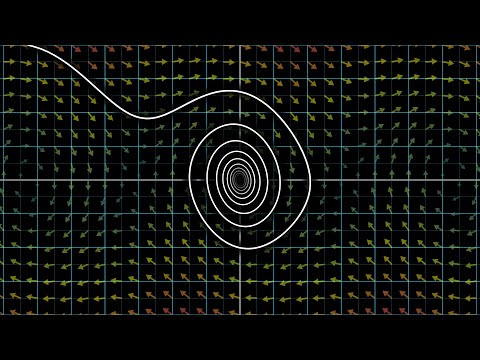
Differential equations, a tourist's guide | DE1
 0:26:57
0:26:57
🔵18 - Second Order Linear Homogeneous Differential Equations with Constants coefficients
 0:04:35
0:04:35
Homogeneous Second Order Linear Differential Equations
 0:12:44
0:12:44
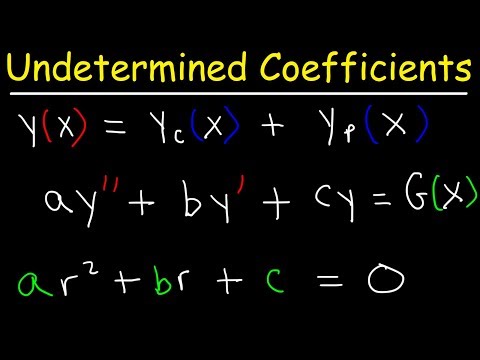
Undetermined Coefficients: Solving non-homogeneous ODEs
 0:03:38
0:03:38
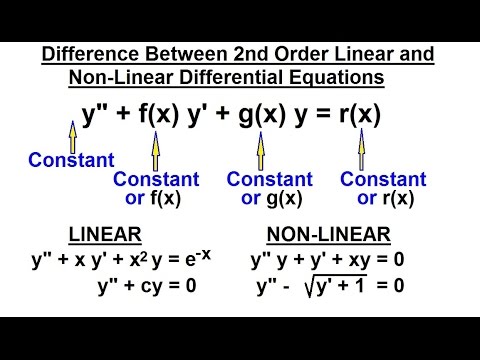
Differential Equation - Introduction (14 of 16) Second Order Differential Eqn. Linear vs Non-Linear
 0:41:28
0:41:28
Method of Undetermined Coefficients - Nonhomogeneous 2nd Order Differential Equations
 0:20:34
0:20:34
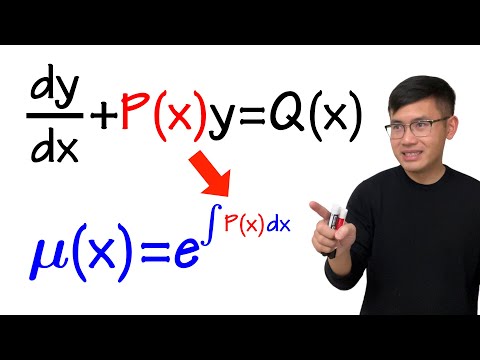
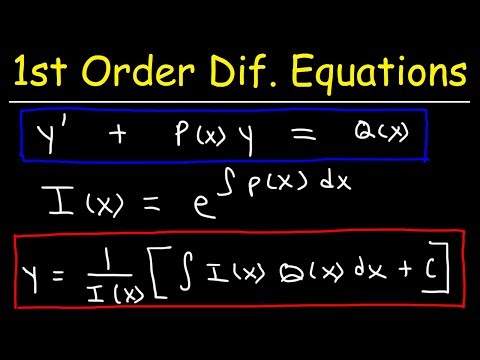
First Order Linear Differential Equation & Integrating Factor (introduction & example)
 0:32:54
0:32:54
Solving Second Order Differential Equations
 0:03:51
0:03:51
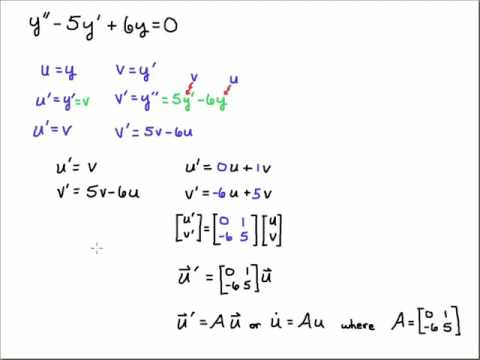
Convert Second-order ODE to First-order Linear System
 0:22:28
0:22:28
First Order Linear Differential Equations
 0:09:25
0:09:25
How To solve Second Order Linear Non Homogeneous Differential Equations | Lesson 1
 0:26:55
0:26:55
Homogeneous Differential Equations
 0:05:21
0:05:21
2nd Order Linear Differential Equations - Auxillary Equation : Introduction : ExamSolutions
Комментарии