filmov
tv
ROS desde cero con C++, creando un catkin_ws y paquete, publicar y suscribirse a un tópico p1/6

Показать описание
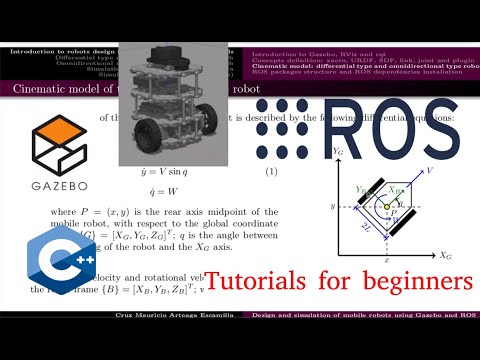
En este video aprenderás a crear un catkin_ws, un paquete de ROS y un archivo lanzador. También, a programar un nodo, usando C++, que publica velocidades en el tópico "/cmd_vel" para mover al robot y se suscribe al tópico "/odom" para obtener la postura de un robot móvil tipo diferencial, simulado en Gazebo.
Este video forma parte de una serie de video tutoriales de ROS desde cero usando los lenguajes de programación C++ y Python.
Description:
In this video, you will learn how to create a catkin_ws, a ROS package and a launch file. Also, to code a node, using C++, that both publishes velocities in the "/cmd_vel" topic to move a robot and subscribes to the "/odom" topic in order to obtain the posture of a differential type mobile robot, simulated in Gazebo.
This video composes a serie of video tutorials about ROS from zero using the C++ and Python programming languages.
Mis cursos: | My courses:
Consigue el código fuente desde mi repositorio de GitHub | Get the source code from my GitHub repo:
Por favor Suscríbete, deja un Me Gusta, Comenta y Comparte | Please Subscribe, Like, Comment and Share.
Cualquier donación es muy bien recibida, gracias | Any donation is very much appreciated, thank you.
Negocios y tutorias | Business Inquiries and Tutoring
Este video forma parte de una serie de video tutoriales de ROS desde cero usando los lenguajes de programación C++ y Python.
Description:
In this video, you will learn how to create a catkin_ws, a ROS package and a launch file. Also, to code a node, using C++, that both publishes velocities in the "/cmd_vel" topic to move a robot and subscribes to the "/odom" topic in order to obtain the posture of a differential type mobile robot, simulated in Gazebo.
This video composes a serie of video tutorials about ROS from zero using the C++ and Python programming languages.
Mis cursos: | My courses:
Consigue el código fuente desde mi repositorio de GitHub | Get the source code from my GitHub repo:
Por favor Suscríbete, deja un Me Gusta, Comenta y Comparte | Please Subscribe, Like, Comment and Share.
Cualquier donación es muy bien recibida, gracias | Any donation is very much appreciated, thank you.
Negocios y tutorias | Business Inquiries and Tutoring
 0:22:35
0:22:35
ROS desde cero con C++, creando un catkin_ws y paquete, publicar y suscribirse a un tópico p1/6
 0:11:16
0:11:16
Antes de aprender ROS
 0:10:49
0:10:49
10 Cómo programar un servicio de ROS (código en C++)
 0:15:13
0:15:13
7 Simple listener y talker en ROS (código en C++)
 0:18:41
0:18:41
Criando um Nó ROS em C++
 0:14:52
0:14:52
Libro Programación con ROS (Sistema Operativo Robótico)
 0:16:54
0:16:54
ROS desde cero con Python, clonando paquete de ROS, publicar y suscribirse a un tópico p2/6
 0:06:04
0:06:04
Creación de un publicador de mensajes en ROS utilizando C++
 1:08:35
1:08:35
2025-01-23 16 H 00 - Conseil d'agglomération Montréal
 1:27:04
1:27:04
Introducción a la Programación de Robots con ROS 2
 0:01:37
0:01:37
Udemy - Aprendiendo ROS desde cero los pilares de la ROBÓTICA
 0:17:21
0:17:21
¿Cómo publicar una imagen/video en ROS? y visualización de video de Gazebo (código en C++)
 0:00:09
0:00:09
RRT path implementation in CPP and ROS
![[ROS Spanish Tutorials]](https://i.ytimg.com/vi/1vWZQK2yDok/hqdefault.jpg) 0:14:43
0:14:43
[ROS Spanish Tutorials] ROS Básico en 5 días #Chapter 0 - part2
 0:15:15
0:15:15
Control Robot Móvil Diferencial con ROS con Odometría | DESDE CERO | Parte 1
![[Udemy ROS Course]](https://i.ytimg.com/vi/ew7IOdajBuE/hqdefault.jpg) 0:04:46
0:04:46
[Udemy ROS Course] Read a Video Stream with OpenCV in C++ with ROS
 0:00:28
0:00:28
#robotics #ros #opencv #opencvpython #robots #computervision
 0:11:30
0:11:30
Robotics Software Engineer PicoDegree | Introduction | ROS with Webots | Part 1
 1:06:01
1:06:01
ROS Developers LIVE-Class #38: How to create a ROS Service in C++
 0:22:42
0:22:42
Программирование c использованием ROS. Урок №3 'Изучение системы сборки основных утилит ROS&apo...
 0:01:00
0:01:00
How to start learning ROS? - Robotics Resources | Day 1 of 30 days of Robotics
 0:19:53
0:19:53
Building a ROS Robot for Mapping and Navigation #1
 2:34:28
2:34:28
ROS Tutorial (ROS1) - ROS Noetic 2H30 [Crash Course]
 0:08:00
0:08:00
1. Installing ROS Melodic Morenia - ROS (C++) With Git From The Ground Up Tutorial Series
Комментарии