filmov
tv
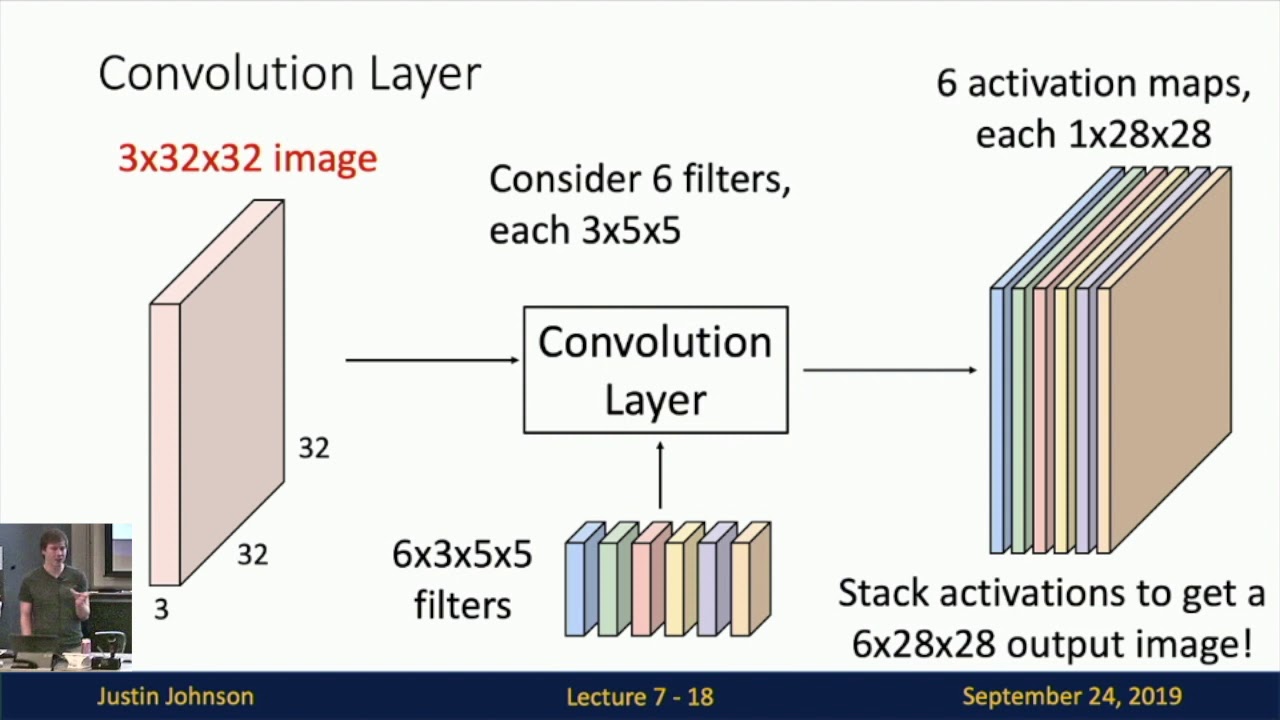
Lecture 7: Convolutional Networks
Показать описание
Lecture 7 moves from fully-connected to convolutional networks by introducing new computational primitives that respect the spatial structure of 2D image data. We discuss convolution layers, which slide a learnable filter over the input data. We discuss pooling layers, which spatially downsample their input data. We then look at normalization layers including batch, layer, and instance normalization, which normalize their input data along different axes and improve training speed.
_________________________________________________________________________________________________
Computer Vision has become ubiquitous in our society, with applications in search, image understanding, apps, mapping, medicine, drones, and self-driving cars. Core to many of these applications are visual recognition tasks such as image classification and object detection. Recent developments in neural network approaches have greatly advanced the performance of these state-of-the-art visual recognition systems. This course is a deep dive into details of neural-network based deep learning methods for computer vision. During this course, students will learn to implement, train and debug their own neural networks and gain a detailed understanding of cutting-edge research in computer vision. We will cover learning algorithms, neural network architectures, and practical engineering tricks for training and fine-tuning networks for visual recognition tasks.
_________________________________________________________________________________________________
Computer Vision has become ubiquitous in our society, with applications in search, image understanding, apps, mapping, medicine, drones, and self-driving cars. Core to many of these applications are visual recognition tasks such as image classification and object detection. Recent developments in neural network approaches have greatly advanced the performance of these state-of-the-art visual recognition systems. This course is a deep dive into details of neural-network based deep learning methods for computer vision. During this course, students will learn to implement, train and debug their own neural networks and gain a detailed understanding of cutting-edge research in computer vision. We will cover learning algorithms, neural network architectures, and practical engineering tricks for training and fine-tuning networks for visual recognition tasks.
 1:08:53
1:08:53
Lecture 7: Convolutional Networks
 1:19:01
1:19:01
CS231n Winter 2016: Lecture 7: Convolutional Neural Networks
 1:11:06
1:11:06
Lecture 7: Convolutional Networks (UMich EECS 498-007)
 0:57:29
0:57:29
DNN 2021: Lecture 7 Convolutional Neural Networks
 1:19:02
1:19:02
CS231n Lecture 7 - Convolutional Neural Networks
 0:45:48
0:45:48
Lecture 7 - Computer Vision, Convolutional Neural Networks
 1:34:58
1:34:58
Stanford CS230: Deep Learning | Autumn 2018 | Lecture 7 - Interpretability of Neural Network
 1:16:17
1:16:17
DeepRob Lecture 7 - Convolutional Neural Networks
 1:19:01
1:19:01
CS231n Winter 2016 Lecture 7 Convolutional Neural Networks LxfUGhug iQ-sHyIqu_S5Ks.mp4
 0:21:32
0:21:32
Convolutional Neural Networks | CNN | Kernel | Stride | Padding | Pooling | Flatten | Formula
 0:59:40
0:59:40
Lecture 7 - Convolutional Neural Network
 0:56:56
0:56:56
DeepNNs 2022: Lecture 7 Convolution in NNs
 0:21:53
0:21:53
ANN online lecture 7 - Convolutional Neural Networks.
 2:08:23
2:08:23
Programming for AI (AI504, Fall 2020), Practice 7: Convolutional Neural Network
 0:12:35
0:12:35
Deep Learning - Lecture 7.4 (Convolutional Neural Networks: Architectures)
 0:55:15
0:55:15
MIT 6.S191 (2023): Convolutional Neural Networks
 0:19:04
0:19:04
Deep Learning - Lecture 7.2 (Convolutional Neural Networks: Downsampling)
 1:15:30
1:15:30
Lecture 7 | Training Neural Networks II
 0:06:58
0:06:58
Convolutional Neural Networks in 7 min (summary)
![[Part 7] Convolutional](https://i.ytimg.com/vi/A1-HocOPXms/hqdefault.jpg) 0:06:16
0:06:16
[Part 7] Convolutional Neural Networks
 0:59:59
0:59:59
Lecture 7 - Neural Network Abstractions
 0:32:43
0:32:43
7. Convolutional Neural Networks
 0:28:41
0:28:41
Reservoir Flow Solutions Lecture-7, Convolution. Fluid flow in Petroleum Reservoirs
 1:25:43
1:25:43
Lecture 11 Learning in Convolutional Neural Networks
Комментарии