filmov
tv
MAE509 (LMIs in Control): Lecture 11, part B - H2 optimal Full State Feedback and Connection to LQR

Показать описание
We propose an LMI for H2-optimal full-state feedback. We also show that H2 full state feedback with B1=I minimizes the effect of initial condition on the output. This shows that LQR is a special case of H2 full-state feedback.
 0:46:18
0:46:18
MAE509 (LMIs in Control): Lecture 14, part A - The S-Procedure and Quadratic Stability using the LFT
 1:05:55
1:05:55
MAE509 (LMIs in Control): Lecture 1, part A - The Big Picture
 0:45:39
0:45:39
MAE509 (LMIs in Control): Lecture 12, part A - Sources of Uncertainty
 1:02:15
1:02:15
MAE509 (LMIs in Control): Lecture 7, part A - System and Signal spaces and Norms
 0:57:46
0:57:46
MAE509 (LMIs in Control): Lecture 8, part A - The Optimal Control Framework
 0:30:16
0:30:16
MAE509 (LMIs in Control): Lecture 14, part B - LMIs for Robust Stability and Control using the LFT
 0:32:33
0:32:33
MAE509 (LMIs in Control): Lecture 13, part A - Robust and Quadratic Stability
 0:45:23
0:45:23
MAE509 (LMIs in Control): Lecture 4, part A - Stability and Eigenvalues
 0:34:47
0:34:47
MAE509 (LMIs in Control): Lecture 11, part B - H2 optimal Full State Feedback and Connection to LQR
 0:50:40
0:50:40
MAE509 (LMIs in Control): Lecture 16, part A - Optimization of Polynomials
 1:07:30
1:07:30
MAE509 (LMIs in Control): Lecture 15, part A - Intro to Nonlinear Systems, Existence and Uniqueness
 0:37:19
0:37:19
MAE509 (LMIs in Control): Lecture 9 - H-infinity optimal Full-State Feedback
 0:33:58
0:33:58
MAE509 (LMIs in Control): Lecture 15, part C - Lyapunov Functions
 0:24:20
0:24:20
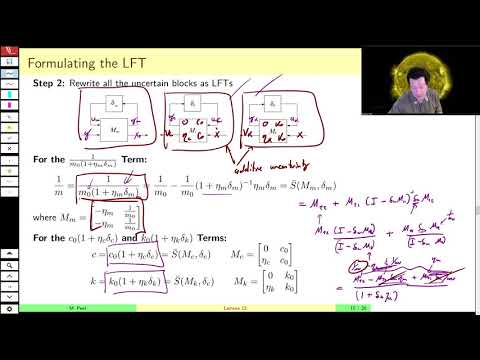
MAE509 (LMIs in Control): Lecture 12, part C - A Case Study in Formulating the LFT
 1:16:02
1:16:02
MAE509 (LMIs in Control): Lecture 14, part C - LMIs for Robust Control with Structured Uncertainty
 0:35:40
0:35:40
MAE509 (LMIs in Control): Lecture 12, part B - Modelling Uncertainty using the LFT
 1:08:13
1:08:13
MAE509 (LMIs in Control): Lecture 17, part A - Local Polynomial Positivity and the Cone of Inference
 0:43:09
0:43:09
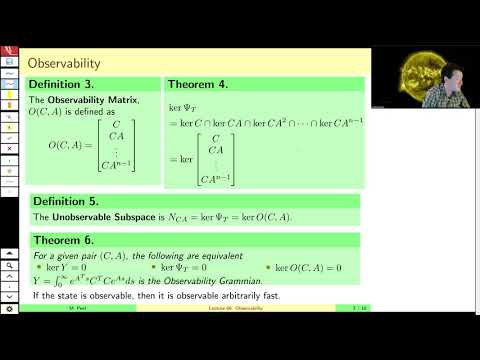
MAE509 (LMIs in Control): Lecture 6, part A - Observability and Duality
 0:37:27
0:37:27
MAE509 (LMIs in Control): Lecture 11, part A - Understanding the H2 norm
 1:54:56
1:54:56
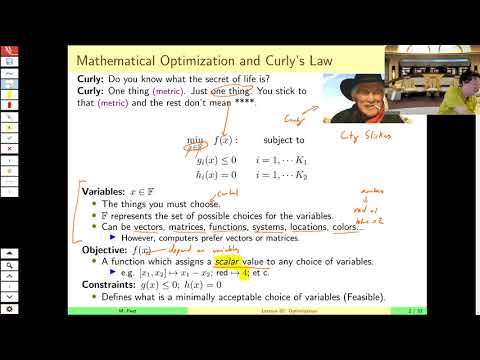
MAE509 (LMIs in Control): Lecture 2, part A - A Minicourse in Optimization
 0:37:08
0:37:08
MAE509 (LMIs in Control): Lecture 17, part B - The Dark Art of the Positivstellensatz
 1:31:21
1:31:21
MAE509 (LMIs in Control): Lecture 2, part B - A Minicourse on Optimization
 0:20:14
0:20:14
MAE509 (LMIs in Control): Lecture 5, part D - Controllability in Discrete Time
 0:44:32
0:44:32
MAE509 (LMIs in Control): Lecture 10, part C - An LMI for H infinity-Optimal Dynamic Output Feedback
Комментарии