filmov
tv
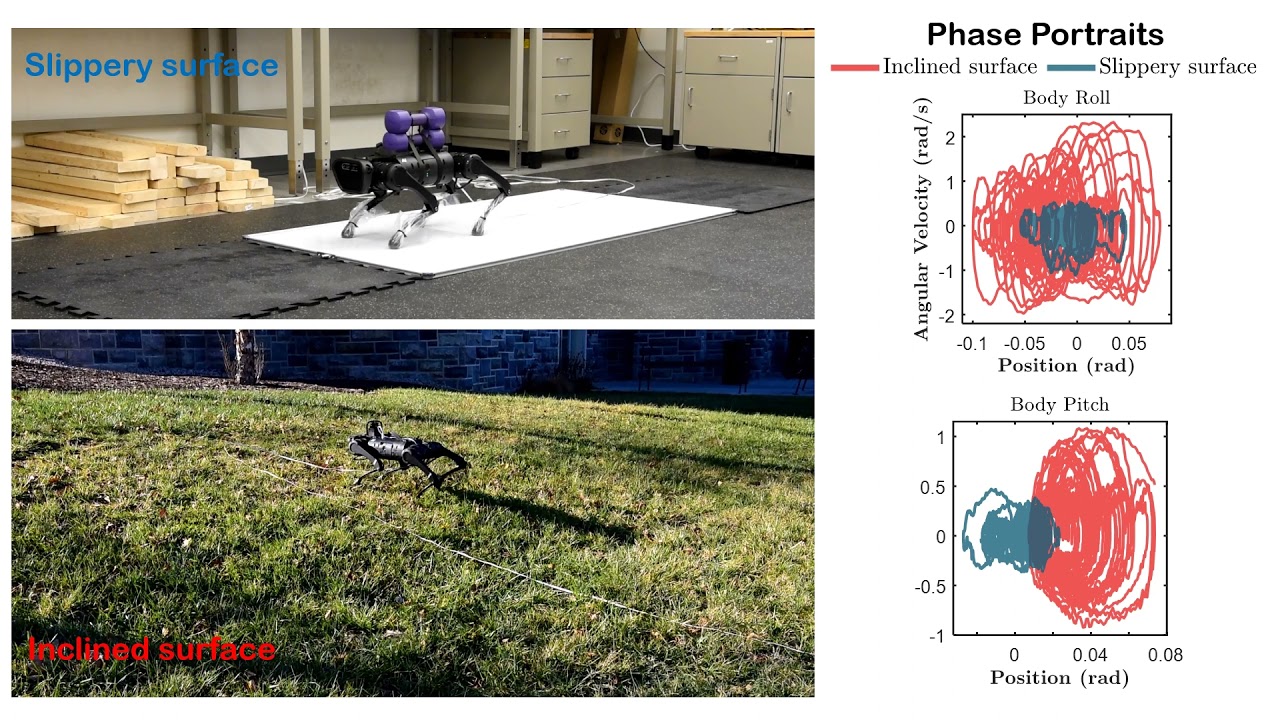
Robust Control for Quadrupedal Locomotion: Learning the Gap between Reduced- and Full-Order Models
Показать описание
Kaveh Akbari Hamed
Рекомендации по теме
0:04:10
Robust Control for Quadrupedal Locomotion: Learning the Gap between Reduced- and Full-Order Models
0:06:51
IROS22: Robust Predictive Control for Quadrupedal Locomotion
0:05:11
HT-LIP Model based Robust Control of Quadrupedal Robot Locomotion under Unknown Ground Motion
0:03:36
Learning a Contact-Adaptive Controller for Robust, Efficient Legged Locomotion
0:04:10
Robust MPC for Quadrupedal Locomotion
0:02:52
Learning Robust Autonomous Navigation and Locomotion for Wheeled-legged Robots
0:02:15
Dynamic Locomotion and Whole-Body Control for Quadrupedal Robots
0:01:42
Force Control for Quadrupedal Locomotion: A Linear Policy Approach
0:04:04
Robust Quadrupedal Locomotion on Sloped Terrains: A Linear Policy Approach
0:05:00
Learning Quadrupedal Locomotion over Challenging Terrain
0:23:33
Joonho Lee: Learning Quadrupedal Locomotion over Challenging Terrain
0:03:33
RL + Model-based Control: Using On-demand Optimal Control to Learn Versatile Legged Locomotion
0:05:58
Learning robust perceptive locomotion for quadrupedal robots in the wild
0:04:59
Hierarchical and Nonlinear Control Algorithms for Robust Quadrupedal Locomotion
0:03:39
Robust Stabilization of Quadrupedal Locomotion via QP-Based Virtual Constraint Controllers
0:05:10
CoRL 2020, Spotlight Talk 501: Robust Quadrupedal Locomotion on Sloped Terrains: A Linear Policy ...
0:00:50
Robot Dog A1 High-Speed and Robust Control
0:02:58
Rethinking Robustness Assessment: Adversarial Attack on Learning-based Quadruped Locomotion Control
0:04:42
Towards a Nonlinear Model Predictive Control for Quadrupedal Locomotion on Rough Terrain
0:01:19
An Efficient Optimal Planning and Control Framework For Quadrupedal Locomotion
0:03:21
Real-Time Planning and Nonlinear Control for Quadrupedal Locomotion with Articulated Tails
0:28:18
Learning robust perceptive locomotion for quadrupedal robots in the wild
0:05:29
RL + Model-based Control: Using On-demand Optimal Control to Learn Versatile Legged Locomotion
0:02:20
Animal Gaits on Quadrupedal Robots Using Motion Matching and Model Based Control - IROS 2021
 0:04:10
0:04:10
 0:06:51
0:06:51
 0:05:11
0:05:11
 0:03:36
0:03:36
 0:04:10
0:04:10
 0:02:52
0:02:52
 0:02:15
0:02:15
 0:01:42
0:01:42
 0:04:04
0:04:04
 0:05:00
0:05:00
 0:23:33
0:23:33
 0:03:33
0:03:33
 0:05:58
0:05:58
 0:04:59
0:04:59
 0:03:39
0:03:39
 0:05:10
0:05:10
 0:00:50
0:00:50
 0:02:58
0:02:58
 0:04:42
0:04:42
 0:01:19
0:01:19
 0:03:21
0:03:21
 0:28:18
0:28:18
 0:05:29
0:05:29
 0:02:20
0:02:20