filmov
tv
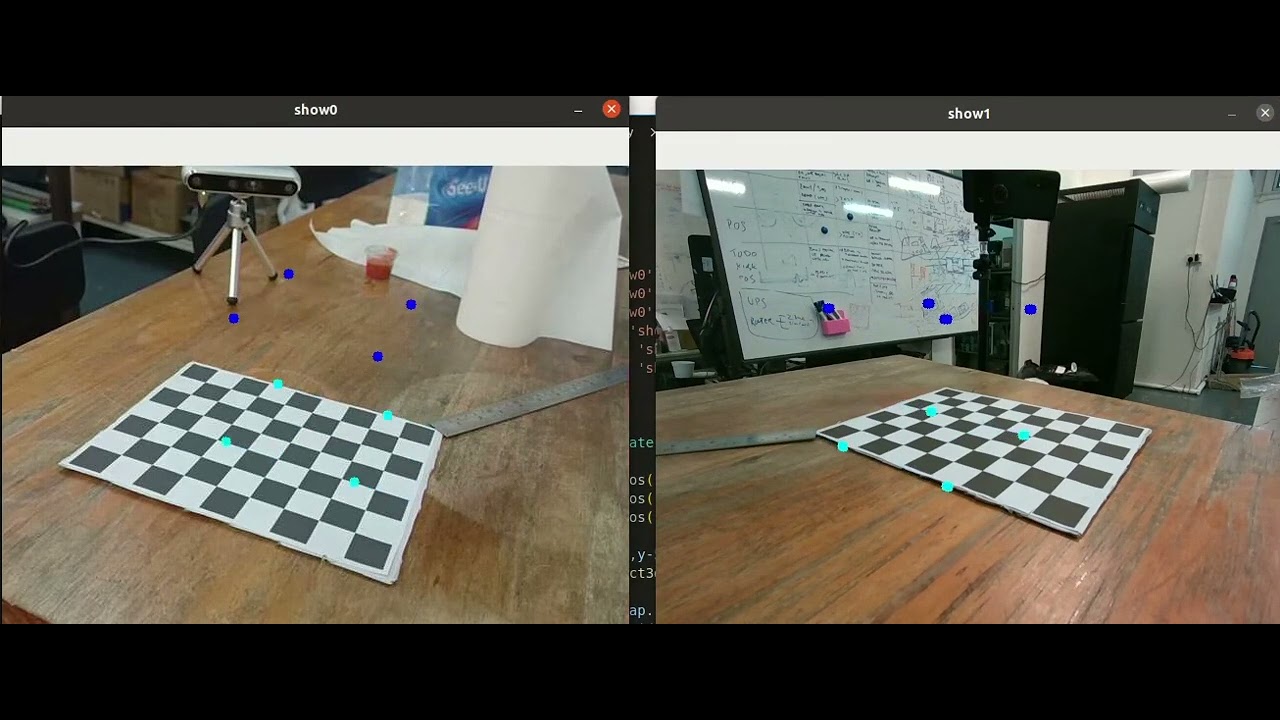
Projection of world cube into multi cameras after intrinsic and extrinsic calibration
Показать описание
During intrinsic and extrinsic calibration, we define a end point of the single fixed calibration board as world origin (0,0,0). After calibration, we can then project a defined cube in world coordinates to image coordinates via the camera project matrix which consist intrinsic and extrinsic matrix
 0:00:26
0:00:26
 0:00:14
0:00:14
 0:00:09
0:00:09
 0:00:37
0:00:37
 0:13:20
0:13:20
 0:00:23
0:00:23
 0:00:15
0:00:15
 0:01:00
0:01:00
 2:29:03
2:29:03
 0:04:46
0:04:46
 0:00:18
0:00:18
 0:03:24
0:03:24
 0:07:52
0:07:52
 0:00:21
0:00:21
 0:00:17
0:00:17
 0:00:40
0:00:40
 0:05:29
0:05:29
 0:00:11
0:00:11
 0:38:45
0:38:45
 0:06:21
0:06:21
 0:00:07
0:00:07
 0:00:17
0:00:17
 0:30:14
0:30:14
 0:03:58
0:03:58