filmov
tv
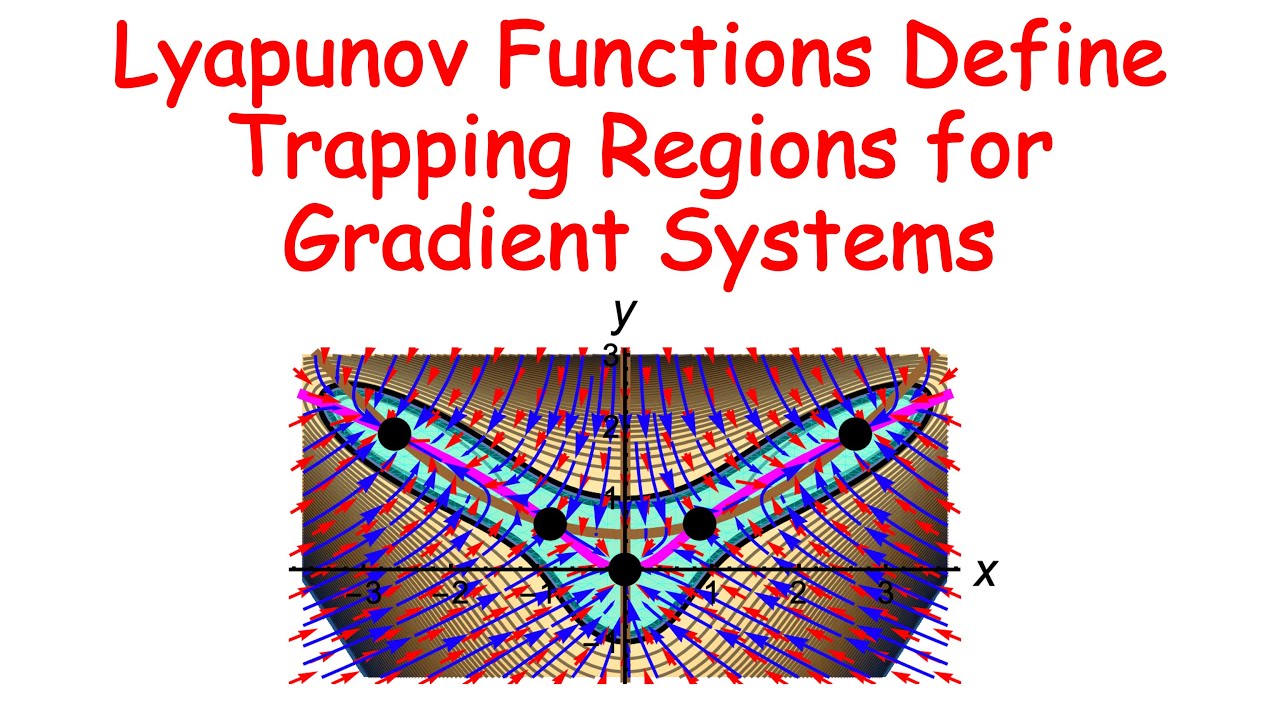
Nonhyperbolic Equilibria, Hamiltonian & Gradient Systems, Lyapunov Function, Ideal & Damped Pendulum
Показать описание
Bill Kinney's Differential Equations and Linear Algebra Course, Lecture 33A.
(a.k.a. Differential Equations with Linear Algebra, Lecture 33A, a.k.a. Continuous and Discrete Dynamical Systems, Lecture 33A).
#hamiltoniansystems #lyapunovfunction #pendulum
(0:00) Lecture plans
(1:20) What can happen at non-hyperbolic equilibrium points?
(1:58) One-parameter family of nonlinear (cubic) ODEs where the polar coordinate “r” is relevant
(4:01) Use Mathematica to see what happens
(9:00) Transformed differential equation for dr/dt (differential equations in the polar coordinate r)
(12:45) Transformed differential equation for dθ/dt (differential equations in the polar coordinate θ)
(15:53) General Hamiltonian systems, Hamiltonian functions, and their properties
(18:16) General gradient systems, potential functions, and their properties
(21:20) Lyapunov function for a gradient system is the negative of the potential function
(22:36) What does it mean to be a Lyapunov function?
(25:23) Lyapunov functions and trapping regions for gradient systems (Lyapunov functions can be used to define trapping regions)
(28:34) Theorem about closed and bounded trapping region (there is at least one solution curve inside the trapping region for all time t)
(32:51) Ideal Pendulum (Undamped) Nonlinear and Unforced ODE
(36:37) This is a Hamiltonian system with Hamiltonian function representing total mechanical energy
(39:25) Physical interpretation of solutions (including separatrices)
(40:54) Damped Pendulum (include friction)
(46:33) Visualize the pendulum motion on Mathematica
AMAZON ASSOCIATE
As an Amazon Associate I earn from qualifying purchases.
 0:48:26
0:48:26
Nonhyperbolic Equilibria, Hamiltonian & Gradient Systems, Lyapunov Function, Ideal & Damped ...
 0:51:43
0:51:43
Diff Eqs Lec #30, Hyperbolic Equilibria, Hamiltonian Systems, Pendulum
 0:34:59
0:34:59
MATC58 Lec 2.4a: nonhyperbolic equilibria and cobwebbing
 1:12:27
1:12:27
Gradient Systems
 0:12:22
0:12:22
Hamiltonian Systems - Nonlinear Systems with Special Structure, Part 2
 1:16:36
1:16:36
Completely Integrable Hamiltonian Systems | Poisson Bracket Series Expansions, Standard Map, Lect 14
 0:07:53
0:07:53
Gradient Systems - Nonlinear Differential Equations with Special Structure, Part 1
 1:00:54
1:00:54
Hamiltonian Normal Forms, Lie Series Method | Infinite-Dimensional Hamiltonians, Lecture 15
 0:32:30
0:32:30
Non Euclidean Phase Spaces (e.g. Invariant Spheres), Lyapunov's 2nd Method (Non Hyperbolic) Exa...
 0:30:31
0:30:31
Lecture 4 (Part 4): Lyapunov function & its properties; Gradient systems and gradient flows
 1:06:20
1:06:20
Center Manifolds for Hamiltonian Systems and PDEs | Lorenz System Bifurcation, Part 2 | Lecture 5
 0:05:53
0:05:53
Change of Variables 1 Dimension (u-substitution)
 1:13:47
1:13:47
Hamiltonian PDEs, Shallow Water Equations, Solitons, KdV, Parametric Resonance Intro, Lecture 16
 1:10:09
1:10:09
DSA2021. Professor Angel Jorba (UB) - Invariant Manifolds in Celestial Mechanics - Lecture 1
 1:14:22
1:14:22
Integrable & Non-Integrable Hamiltonian Systems, KAM Tori, Poincare Section, Poisson Bracket, Le...
 0:12:38
0:12:38
Hamiltonian Systems
 0:43:36
0:43:36
M-07. The Hamilton’s Formalism
 1:08:57
1:08:57
MATH356 Lecture 8 Part 2
 1:15:59
1:15:59
Hyperbolic vs Non-Hyperbolic Fixed Points- Computing Invariant Manifolds via Taylor Series Lecture 2
 1:12:41
1:12:41
Canonical Transformations | Hamiltonian Changes of Variables | Symplectomorphisms | Lecture 5
 1:01:47
1:01:47
Hamiltonian Flow is a Canonical Transformation | Strange Non-Intuitive Momenta | Lecture 8
 0:21:39
0:21:39
Conservative Systems - Nonlinear Systems with Special Structure, Part 3
 0:00:12
0:00:12
Hyperbolic umbilic singularity D4+
 0:14:27
0:14:27
Limit Cycles, Part 4: Van der Pol Equation, Strongly Nonlinear Limit, Relaxation Oscillations
Комментарии