filmov
tv
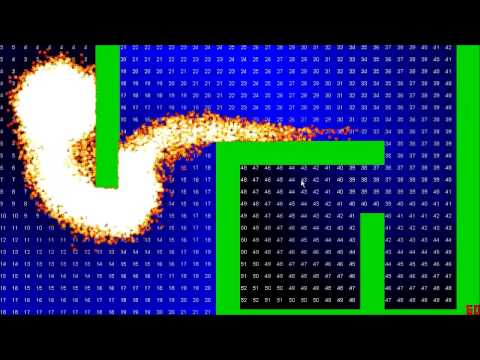
How do vector field Pathfinding algorithm work ?

Показать описание
In today's video, we will see how to create from scratch a vector field pathfinding algorithm.
Excuse all the english mistakes.
All the animations were made on after effect and premiere pro.
Pas De Nom 2020
Excuse all the english mistakes.
All the animations were made on after effect and premiere pro.
Pas De Nom 2020
 0:07:12
0:07:12
How do vector field Pathfinding algorithm work ?
 0:03:19
0:03:19
Understanding Goal-Based Vector Field Pathfinding
 0:04:35
0:04:35
RTS: vector field pathfinding, steering behavior, dynamic arrival, collisions solving
 0:11:14
0:11:14
How Flow Field Pathfinding Works - Flow Fields in Unity ep. 1
 0:00:33
0:00:33
Flow Field Pathfinding
 0:00:48
0:00:48
How Can I Understand Vector Field Pathfinding Algorithms?
 0:02:20
0:02:20
Flow Field Pathfinding for Games C++ and SDL2 from Scratch
 0:03:03
0:03:03
Goal-based vector field pathfinding algorithm - Showcase
 0:24:49
0:24:49
Tutorial - Flow Field Pathfinding in Unity
 0:01:43
0:01:43
Vector field pathfinding using a compute shader
 1:12:15
1:12:15
COMP4303 - AI for Video Games - Lecture 07 - Assignment 2 (Vector Field Pathfinding)
 0:01:52
0:01:52
Flow Field Pathfinding - Unreal Engine
 0:00:32
0:00:32
Roblox Vector Field Pathfinding -- Test_1 : 100 Entities
 0:04:06
0:04:06
RTS: vector field pathfinding, steering behavior, dynamic arrival, collisions solving (v2)
 0:06:48
0:06:48
Vector field pathfinding demo
 0:00:05
0:00:05
guiding vector field go oomie zoomie
 0:07:54
0:07:54
A Comparison of Pathfinding Algorithms
 0:00:59
0:00:59
raycast-vector pathfinding
 1:30:25
1:30:25
Updating old Vector Field Pathfinding/Collaborative Diffusion project
 0:00:33
0:00:33
Vector fields
 0:02:21
0:02:21
Unreal Engine 5.1 - Vector Field
 0:14:03
0:14:03
Creative Coding: Vector Fields
 0:03:23
0:03:23
Potencial field pathfinding with crude fast logarithmic attraction field
 0:04:06
0:04:06
My Google cardboard Build Log #3: Vector field pathfinding
Комментарии