filmov
tv
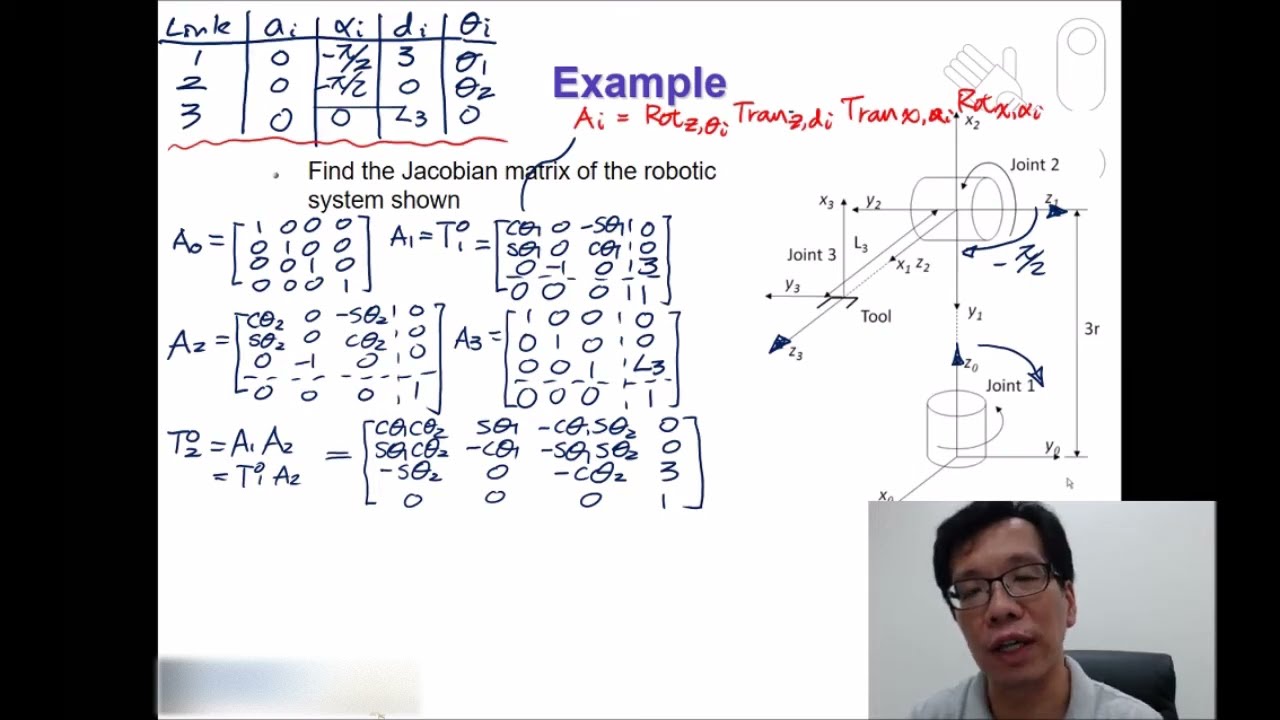
Example -- Forward Kinematics and Jacobian Matrix
Показать описание
 0:12:16
0:12:16
Forward Kinematics (with solved examples) | Homogeneous Transformations | Robotics 101
 0:03:28
0:03:28
Modern Robotics, Chapter 4: Forward Kinematics Example
 0:02:06
0:02:06
Forward Kinematics of 2D Manipulator | forward kinematics robotics example
 0:05:21
0:05:21
Introduction to DH Convention
 0:12:32
0:12:32
Intro2Robotics Lecture 7b: Forward to Inverse Kinematics example
 0:08:26
0:08:26
Denavit–Hartenberg parameters of a 3-link manipulator with prismatic joint - Example
 0:02:54
0:02:54
Inverse or Forward kinematics Explained under 3 minutes
 0:07:43
0:07:43
4.1 Forward Kinematics
 0:13:08
0:13:08
Forward Kinematics (with solved examples) pt. 2 | Homogeneous Transformations | Robotics 101
 0:07:47
0:07:47
FK and IK Explained - Which One to Use and When?
 0:02:59
0:02:59
Forward kinematics #kinematics #robotics #animation
 0:30:18
0:30:18
Example -- Forward Kinematics and Jacobian Matrix
 0:34:32
0:34:32
Coding Challenge #64.1: Forward Kinematics
 0:07:47
0:07:47
Forward Kinematics of robots | Planar 2D robots | Robotics 101
 0:03:20
0:03:20
Forward and inverse kinematics #robotics #kinematics #animation
 0:11:04
0:11:04
Inverse or Forward kinematics - Blender animation tutorial
 0:00:42
0:00:42
3 DOF forward kinematics simulation model (Usage example) - Python
 0:11:44
0:11:44
Denavit - Hartenberg (DH) Tables For Robotic Systems - Direct Kinematics II
 1:41:55
1:41:55
6 Axis Robot Forward & Inverse Kinematics Tutorial - Denavit Hartenberg Parameters With the AR4-...
 0:05:11
0:05:11
Homogeneous Transforms and Forward Kinematics - HEBI Robotics - Lecture Series
 0:05:35
0:05:35
What is IK and FK?
 0:09:41
0:09:41
Inverse Kinematics of Robots | Robotics 101
 0:03:01
0:03:01
Denavit-Hartenberg Reference Frame Layout
 0:13:00
0:13:00
Forward Kinematics of Industrial Robot | Part 1| Robotics 201
Комментарии