filmov
tv
Nonlinear observers: Precursors for controlling noisy real-world systems (IEEE talk @ UBC)

Показать описание
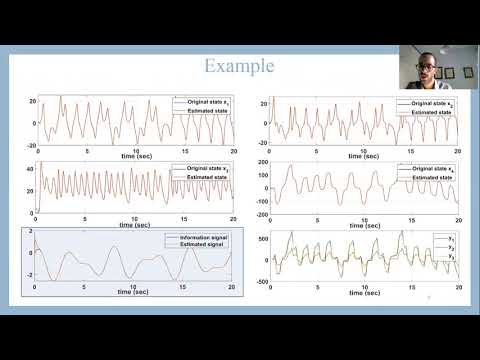
Gives a brief overview of Observer/Adaptive observer design and for Generalised Sector Bounded Nonlinear system in the presence of noise and input disturbance
(This is my talk for IEEE CS/RA/SMC Technical Event on August 14 2017)
(This is my talk for IEEE CS/RA/SMC Technical Event on August 14 2017)
 0:43:57
0:43:57
Nonlinear observers: Precursors for controlling noisy real-world systems (IEEE talk @ UBC)
 1:31:40
1:31:40
Nonlinear Observers: Methods and Application Part-1
 0:00:34
0:00:34
Robust Attitude Control for Quadrotors using Nonlinear Disturbance Observer
 0:37:20
0:37:20
Nonlinear Observers
 0:44:21
0:44:21
Observer Design for a Class of Uncertain Nonlinear Systems with Sampled Outputs
 0:10:52
0:10:52
Adaptive Parameter Estimation-based Observer Design for Nonlinear Systems
 0:03:28
0:03:28
Backstepping Disturbance Observer-Based Control For Trajectory Tracking Under External Disturbance
 0:08:32
0:08:32
Various methods and theory in control engineering
 0:09:56
0:09:56
An Introduction to Observers, 18/4/2016
 0:08:14
0:08:14
Non-fragile H-infinity Observer for a class of Nonlinear Systems
 0:02:16
0:02:16
Adaptive Disturbance Observer: On the improvement of the Non-Linear PD Control
 1:09:04
1:09:04
Lecture 16 - Disturbance Observers, Part 2 - Advanced Control Systems
 0:02:00
0:02:00
An Adaptive Speed Observers’ Design for a Class of Nonlinear Mechanical Systems
 0:12:40
0:12:40
Observer design for nonlinear descriptor systems - A survey
 0:01:20
0:01:20
Nonlinear Vision-based Observer for Visual Servo Control of an Aerial Robot
 0:55:14
0:55:14
An Interval Observer-Based Anti-Disturbance Control Strategy for a Rigid Satellite
 0:31:42
0:31:42
UIO
 0:01:40
0:01:40
An adaptive Non linear observer for BOOST PFC AC/DC converter....Hardware
 0:00:39
0:00:39
Force Estimation with Luenberger-Sliding Observers
 0:01:19
0:01:19
External Force Estimation using Semi-parametric Model and Nonlinear Disturbance Observer ...-vidoe
 0:01:01
0:01:01
Hybrid Nonlinear Disturbance Observer Design for Underactuated Bipedal Robots
 0:10:08
0:10:08
Research paper Explained || TRAS || Disturbance Observer
 0:00:15
0:00:15
Disturbance Observer Based Control for Dual Stage Grid Tied Photovoltaic System Under Unbalanced Gri
 1:07:30
1:07:30
MAE509 (LMIs in Control): Lecture 15, part A - Intro to Nonlinear Systems, Existence and Uniqueness
Комментарии