filmov
tv
ICRA 2021: Learning Spring Mass Locomotion

Показать описание
This is the presentation of our 2021 ICRA and RA-L paper "Learning Spring Mass Locomotion: Guiding Policies With a Reduced-Order Model" by Kevin Green, Yesh Godse, Jeremy Dao, Ross L. Hatton, Alan Fern, Jonathan Hurst.
 0:13:01
0:13:01
ICRA 2021: Learning Spring Mass Locomotion
 0:09:50
0:09:50
Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling (ICRA 2021)
 0:00:29
0:00:29
ICRA 2021 - Predicting Walking Target from Gaze
 0:10:01
0:10:01
Energy-Recycling Actuator Control - ICRA Talk
 0:12:40
0:12:40
Robot Learning with Crash Constraints - ICRA 2021 presentation
 0:12:25
0:12:25
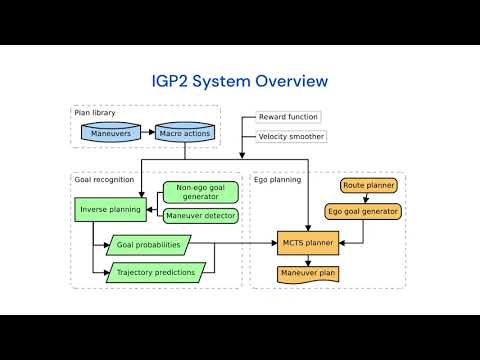
ICRA 2021 IGP2 presentation
 0:11:02
0:11:02
ICRA 2021: Learning Task Space Actions for Bipedal Locomotion
 0:11:04
0:11:04
ICRA2021: Resilient Collision-Tolerant Navigation in Confined Environments
 0:14:17
0:14:17
Optimal deep learning for robot touch - Talk ICRA 2021 Lepora
 0:05:42
0:05:42
Recurrent Asynchronous Multimodal Networks for Monocular Depth Prediction (ICRA 2021 Video Pitch)
 0:03:21
0:03:21
Learning Spring Mass Locomotion on Cassie
 0:12:00
0:12:00
HanGrawler presentation (ICRA 2021)
 0:11:02
0:11:02
ICRA 2021 talk: Alternative Paths Planner
 0:03:16
0:03:16
ICRA 2021, Xian China /Crazy Robotic Shows
 0:12:59
0:12:59
Constraint Handling in Continuous-Time DDP-Based Model Predictive Control (ICRA 2021 Presentation)
 0:15:00
0:15:00
IEEE ICRA 2021 : Variable-Stiffness Leaf Spring Mechanism
 10:23:58
10:23:58
ICRA 2021 Workshop on Teleoperation of Dynamic Legged Robots in Real Scenarios
 0:14:20
0:14:20
Imitation Learning from MPC for Quadrupedal Multi-Gait Control (ICRA 2021 Presentation)
 0:10:17
0:10:17
ICRA 2021 Talk - Go Fetch! Dynamic Grasps using Boston Dynamics Spot with External Robotic Arm
 0:13:19
0:13:19
ICRA 2021 Oral: Learning a semantic control space for expressive robot cinematography
 0:08:06
0:08:06
Presentation of RA-L paper on ICRA 2021
 0:10:56
0:10:56
ICRA 2021 - Flocking Segregative Swarming Behaviors using Gibbs Random Fields
 0:02:59
0:02:59
ICRA 2021 Teaser · Inverse Dynamics vs. Forward Dynamics in Direct Transcription Formulations
 0:11:25
0:11:25
RA-L/ICRA 2021 - Unified Landmark Tracking for Odometry [Finalist ICRA Best Student Paper]
Комментарии