filmov
tv
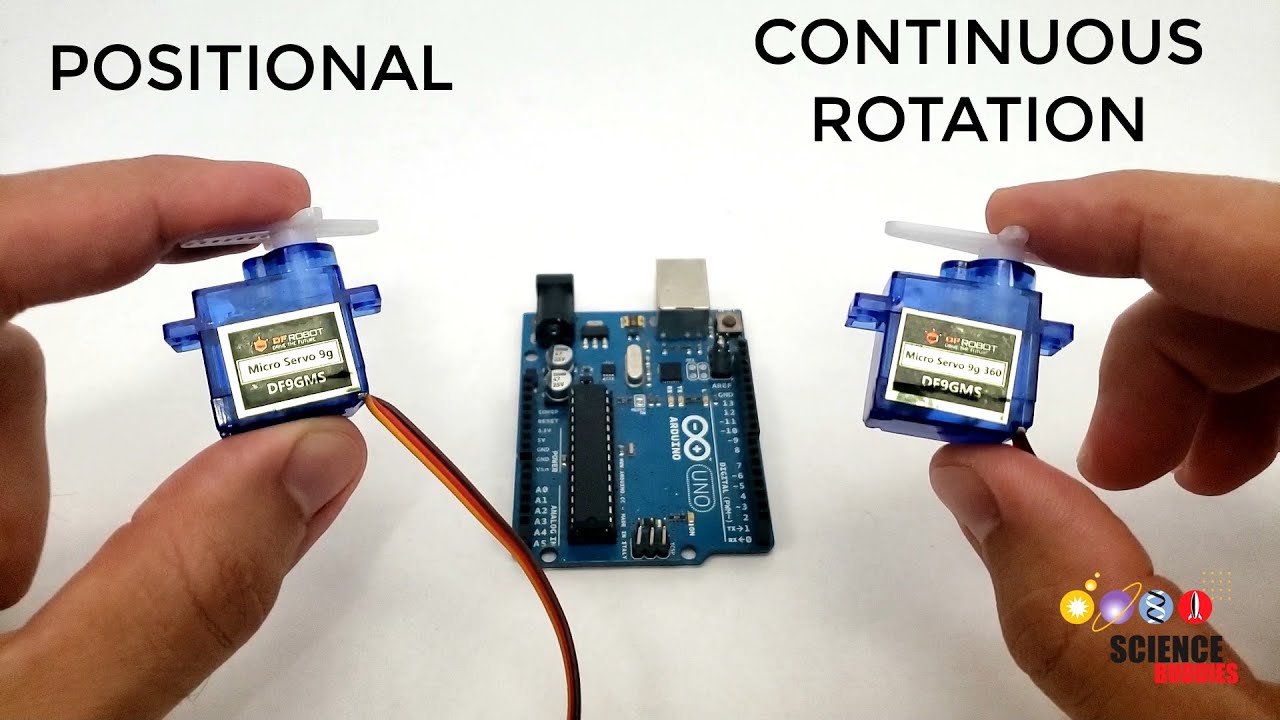
Positional vs Continuous Rotation Servo Motors
Показать описание
0:00 introduction
0:25 positional servo
0:48 arduino servo library
1:42 continuous rotation servo
3:42 potentiometer control
4:48 pulse width modulation
#STEM #sciencebuddies #arduino #electronics
*******************************
Connect with Science Buddies:
 0:06:48
0:06:48
Positional vs Continuous Rotation Servo Motors
 0:04:42
0:04:42
Continuous Rotation Servo Motors and Arduino (Lesson #11)
 0:00:38
0:00:38
What The Differences Between Stepper Motors And Servo Motors
 0:01:41
0:01:41
Control the positioning of a continuous servo with a potentiometer and arduino
 0:04:15
0:04:15
Quick Guide to Servos
 0:01:30
0:01:30
How to Make ANY servo rotate 360° - EASY and FAST
 0:02:32
0:02:32
Servo vs Stepper Motors
 0:00:16
0:00:16
MKR-1000 and continuous rotation servo with magnetic encoder
 0:00:18
0:00:18
360 Degree Continuous Rotation Servo: 6V 13KG 25T Digital Servo
 0:01:42
0:01:42
How to mod a servo for 360 degree continuous rotation
 0:00:12
0:00:12
Feetech FS90R 360 Degree Continuous Rotation Micro RC Servo 6V 1.5KG
 0:00:31
0:00:31
Feetech FS90R Continuous Rotation Micro Servo with wheel test
 0:04:42
0:04:42
SERVO CONTINUOUS ROTATION MOD WITH PWM ROTATION/SPEED CONTROL
 0:00:09
0:00:09
TowerPro SG90 Continuous Rotation 360 Degree Servo Motor
 0:05:55
0:05:55
Electronic Basics #25: Servos and how to use them
 0:10:03
0:10:03
Making a rc servo spin continuous 360 and hold position.
 0:01:21
0:01:21
REVO - Continuous Servo with Position Control
 0:00:39
0:00:39
Continuous Rotation Servo
 0:03:15
0:03:15
Continuous Rotation Servo Mod for Microcontroller Use
 0:15:12
0:15:12
Servo Motors, how do they work?
 0:16:16
0:16:16
How to make a 360 degree Continuous Rotation Servo Motor
 0:01:29
0:01:29
How to center a continuous rotation Servo motor
 0:03:00
0:03:00
What are the 3 types of servo motors
 0:00:55
0:00:55
DIY Continuous Servo with Position Feedback
Комментарии