filmov
tv
Deriving Percent Overshoot, Settling Time, and Other Performance Metrics

Показать описание
In this video we examine a second order dynamic system and derive how various performance metrics (such as time to first peak, magnitude at first peak, percent overshoot, settling time, and rise time) are related to the damping ratio and natural frequency of the system.
 0:59:14
0:59:14
Deriving Percent Overshoot, Settling Time, and Other Performance Metrics
 0:11:47
0:11:47
Transient Response of Dynamical Systems: Peak Time, Rise Time, Settling Time and Overshoot
 0:10:06
0:10:06
Problem to calculate rise time, peak time , peak overshoot , Max Peak Overshoot and settling time |
 0:24:53
0:24:53
Derivation of Formulas for Peak Time and Overshoot of Step Response - Control System Lectures
 0:08:53
0:08:53
Module-3 L-18 Calculating the Rise Time, Peak Time and Peak Overshoot
 0:07:50
0:07:50
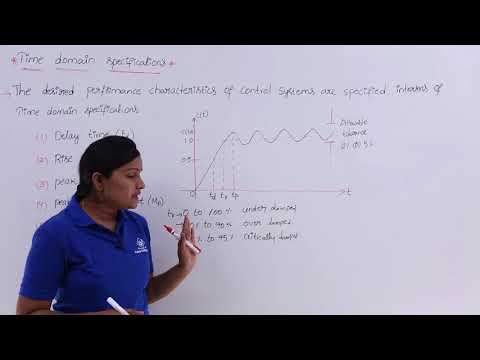
Time Domain Specifications
 0:09:38
0:09:38
L-10 || Derivations of Settling Time & Maximum Peak Overshoot || Time Response Analysis
 0:14:56
0:14:56
The Step Response | Control Systems in Practice
 0:09:25
0:09:25
Problem to calculate rise time, peak time , peak overshoot , Max Peak Overshoot and settling time
 0:04:48
0:04:48
Settling Time
 0:05:59
0:05:59
Rise Time
 0:09:08
0:09:08
MATLAB How to Calculate System Response: Rise Time, Settling Time, Overshoot
 0:05:36
0:05:36
#179 Expression for PEAK OVERSHOOT in second order system with unit step response || EC Academy
 0:07:07
0:07:07
Peak Overshoot
 0:09:22
0:09:22
Peak Time
 0:05:06
0:05:06
#177 Expression for RISE TIME in second order system with unit step response || EC Academy
 0:05:05
0:05:05
Derivation of Rise time | Transient specification | Control System | Mathspedia |
 1:18:52
1:18:52
Systems and Simulation - Lecture 18: Percent overshoot and settling time (transient response)
 0:08:35
0:08:35
Control Systems - Simulink - Percent Overshoot, Rise Time and Settling Time
 0:06:10
0:06:10
Matlab - How to see Overshoot, Undershoot, Rise Time, Settling Time, Peak.
 0:07:27
0:07:27
Rise Time, Peak Time, Settling Time & Overshoot in 7 minutes | Control Systems | Urdu/Hindi Lect...
 0:14:10
0:14:10
DERIVATION OF PEAK OVERSHOOT or MAXIMUM OVERSHOOT (Mp) |TIME DOMAIN SPECIFICATIONS| Control Systems
 0:07:34
0:07:34
#178 Expression for PEAK TIME in second order system with unit step response || EC Academy
 0:10:33
0:10:33
Maximum peak overshoot, delay time, rise time, peak time, settling time
Комментарии