filmov
tv
Master Thesis: Multi-Robot Collaborative Autonomous Exploration

Показать описание
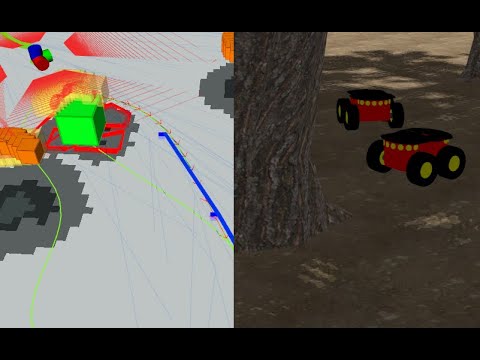
This video showcases our thesis work during the spring of 2023. Four Turtlebot3 robots collaborated with a connected network with initially unknown starting positions. By utilizing GMapping and autonomous exploration together with a Map Merging package from ROS, the robots collaborated and explored unknown environments to create a map.
Map Merging ROS package: multirobot_map_merge
Map Merging ROS package: multirobot_map_merge
 0:03:00
0:03:00
Master Thesis: Multi-Robot Collaborative Autonomous Exploration
 0:03:00
0:03:00
Master Thesis: Multi-Robot Collaborative Autonomous Exploration With Text
 0:01:40
0:01:40
Multi-robot nav2 demo in ROS2 Humble | Degree Thesis video 1
 0:00:27
0:00:27
multi robot navigation
 0:01:26
0:01:26
Coxgraph: Efficient Architecture for Multi-Robot Collaborative Volumetric Mapping and Exploration
 0:01:00
0:01:00
High-Level Coordination of Multi-Robot Systems for Collective Search
 0:00:47
0:00:47
RobSwarm: Deep reinforcement multi robot mapping
 0:00:38
0:00:38
Multi-robot Exploration with Custom RRT* and homotopy classes trajectory optimization integration
 0:06:12
0:06:12
Deep Reinforcement Learning for Decentralized Multi-Robot Exploration with Macro Actions
 0:01:36
0:01:36
ROS 2 multi robot localization demo
 0:00:52
0:00:52
Multi-Robot Object Search in Cluttered Environment
 0:01:36
0:01:36
Multi Robot SLAM Simulated Environment
 0:01:05
0:01:05
Multi Robot Collsion Avoidance with Velocity Obstacle(turtlebot3 burger)
 0:00:50
0:00:50
Multi robot communication and Nav with ROS2
 0:01:37
0:01:37
Multi Robot SLAM Real Environment
 0:02:44
0:02:44
Multi Robot Mapping Subject to Communication Constraints
 0:01:36
0:01:36
Multi Robot SLAM Simulated Environment
 0:01:19
0:01:19
Multi-Robot System - Frontier exploration: fast approach
 0:00:17
0:00:17
Sistemas Multirobot - Movimiento Coordinado
 0:00:59
0:00:59
ROS2 Solving Community Question #4
 0:00:27
0:00:27
multi robot tracking
 0:01:19
0:01:19
Swarm-SLAM: Sparse Decentralized C-SLAM Framework for Multi-Robot Systems
 0:01:25
0:01:25
Co-operative multi-robot dynamic formation control
 0:50:31
0:50:31
Prof. Park: Multi-Robot Task Allocation Games in Dynamically Changing Environments(Trash Collection)
Комментарии