filmov
tv
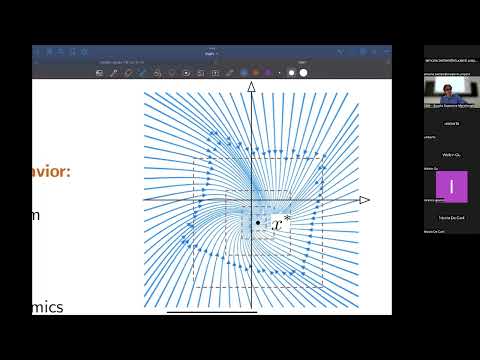
Contracting Dynamical Systems (3/4), F Bullo, UC Santa Barbara, Nov 2022

Показать описание
Contracting Dynamical Systems (3/4), F Bullo, UC Santa Barbara, Nov 2022
Minicourse (10h) by Francesco Bullo, UC Santa Barbara, taught at the
Scuola Superiore Meridionale in Naples, Italy, Nov 2022.
Chapters:
0:00 introduction
0:30 intro and motivation for recurrent and implicit neural networks
14:44 Hopfield and firing rate models
32:36 norms and log norms of matrix polytopes
42:00 BREAK
45:42 non-Euclidean log norms of multiplicatively-scaled matrices
1:03:14 strong infinitesimal contracrivity of firing rate models
1:22:12 optimal norms for Metzler matrices
1:29:45 BREAK
1:35:50 minimizing one-side Lipschitz constants
1:43:51 efficient computation of equilibrium points
1:47:50 infinitesimal contraction theorem
1:53:40 average iteration and optimal step sizes
2:07:57 average iteration for firing rate models
ABSTRACT: Over the last two decades, engineers and mathematicians have made remarkable progress on the application of the Banach contraction principle to dynamical systems over networks. The basic contraction property is now understood for discrete and continuous time systems, with respect to Euclidean and non-Euclidean norms, in closed and open systems, and for single agents and networks of systems. In this set of lectures, I will provide a recent comprehensive introduction into this theoretical field and its applications. Topics will include (i) the manifold properties of the induced norms and logarithmic norms of matrices, (ii) contracting dynamics over finite-dimensional vector spaces endowed with Euclidean and non-Euclidean norms, and (iii) weakly-contracting dynamics and monotone dynamics. Numerous examples will be presented, including Hopfield neural networks, interconnected contracting systems, and gradient and primal dual flows of convex functions. I will conclude the presentation by discussing strengths and weaknesses of this theory.
BIO: Francesco Bullo is Distinguished Professor of Mechanical Engineering at the University of California, Santa Barbara. He was previously associated with the University of Padova, the California Institute of Technology, and the University of Illinois. He served as IEEE CSS President and as SIAG CST Chair. His research focuses on contraction theory, network systems and distributed control with application to machine learning, power grids, social networks, and robotics. He is the coauthor of “Geometric Control of Mechanical Systems” (Springer, 2004), “Distributed Control of Robotic Networks” (Princeton, 2009), “Lectures on Network Systems” (KDP, 2022, v1.6), and “Contraction Theory for Dynamical Systems” (KDP, 2022, v1.0). He is a Fellow of ASME, IEEE, IFAC, and SIAM.
Minicourse (10h) by Francesco Bullo, UC Santa Barbara, taught at the
Scuola Superiore Meridionale in Naples, Italy, Nov 2022.
Chapters:
0:00 introduction
0:30 intro and motivation for recurrent and implicit neural networks
14:44 Hopfield and firing rate models
32:36 norms and log norms of matrix polytopes
42:00 BREAK
45:42 non-Euclidean log norms of multiplicatively-scaled matrices
1:03:14 strong infinitesimal contracrivity of firing rate models
1:22:12 optimal norms for Metzler matrices
1:29:45 BREAK
1:35:50 minimizing one-side Lipschitz constants
1:43:51 efficient computation of equilibrium points
1:47:50 infinitesimal contraction theorem
1:53:40 average iteration and optimal step sizes
2:07:57 average iteration for firing rate models
ABSTRACT: Over the last two decades, engineers and mathematicians have made remarkable progress on the application of the Banach contraction principle to dynamical systems over networks. The basic contraction property is now understood for discrete and continuous time systems, with respect to Euclidean and non-Euclidean norms, in closed and open systems, and for single agents and networks of systems. In this set of lectures, I will provide a recent comprehensive introduction into this theoretical field and its applications. Topics will include (i) the manifold properties of the induced norms and logarithmic norms of matrices, (ii) contracting dynamics over finite-dimensional vector spaces endowed with Euclidean and non-Euclidean norms, and (iii) weakly-contracting dynamics and monotone dynamics. Numerous examples will be presented, including Hopfield neural networks, interconnected contracting systems, and gradient and primal dual flows of convex functions. I will conclude the presentation by discussing strengths and weaknesses of this theory.
BIO: Francesco Bullo is Distinguished Professor of Mechanical Engineering at the University of California, Santa Barbara. He was previously associated with the University of Padova, the California Institute of Technology, and the University of Illinois. He served as IEEE CSS President and as SIAG CST Chair. His research focuses on contraction theory, network systems and distributed control with application to machine learning, power grids, social networks, and robotics. He is the coauthor of “Geometric Control of Mechanical Systems” (Springer, 2004), “Distributed Control of Robotic Networks” (Princeton, 2009), “Lectures on Network Systems” (KDP, 2022, v1.6), and “Contraction Theory for Dynamical Systems” (KDP, 2022, v1.0). He is a Fellow of ASME, IEEE, IFAC, and SIAM.
 2:16:01
2:16:01
 2:33:49
2:33:49
 2:26:14
2:26:14
 2:30:11
2:30:11
 1:43:05
1:43:05
 0:00:16
0:00:16
 0:53:05
0:53:05
 1:39:12
1:39:12
 1:57:05
1:57:05
 0:01:18
0:01:18
 1:30:19
1:30:19
 0:00:58
0:00:58
 1:41:29
1:41:29
 1:46:16
1:46:16
 0:40:00
0:40:00
 0:08:25
0:08:25
 0:56:28
0:56:28
 0:06:58
0:06:58
 1:38:27
1:38:27
 0:05:02
0:05:02
 0:00:15
0:00:15
 0:07:45
0:07:45
 1:06:45
1:06:45
 0:07:01
0:07:01