filmov
tv
Lecture 12: Camera Model

Показать описание
UCF Computer Vision Video Lectures 2012
 1:32:13
1:32:13
Lecture 12: Camera Model
 1:10:32
1:10:32
Lecture 12 - Camera Model and caliberation - 2014
 0:55:11
0:55:11
3D Computer Vision | Lecture 12 (Part 1): Generalized cameras
 0:45:33
0:45:33
3D Computer Vision | Lecture 12 (Part 2): Generalized cameras
 0:41:42
0:41:42
3D Computer Vision | Lecture 12 (Part 3): Generalized cameras
 1:15:48
1:15:48
Lecture 12 | Visualizing and Understanding
 1:07:41
1:07:41
Lecture #12: Publishing Part One — Brandon Sanderson on Writing Science Fiction and Fantasy
 0:30:44
0:30:44
Lecture 12: Digital Photogrammetry
 1:29:40
1:29:40
St Mary's Perivale LIVE : Hugh Mather Lecture - St Mary's Perivale 2004-2024
 0:02:29
0:02:29
Learn Unity DOTS! (Dynamic Buffers, Baking System, Camera System, 12 NEW Lectures)
 1:00:19
1:00:19
3D Computer Vision | Lecture 5 (Part 1): Camera models and calibration
 0:24:19
0:24:19
Intro2Robotics Lecture 15: Computer Vision, world frame to camera frame to pixel coordinates
 0:24:44
0:24:44
Class 10 - Physics - Chapter 12 - Lecture 12 Applications of Lenses - Allied Schools
 0:35:23
0:35:23
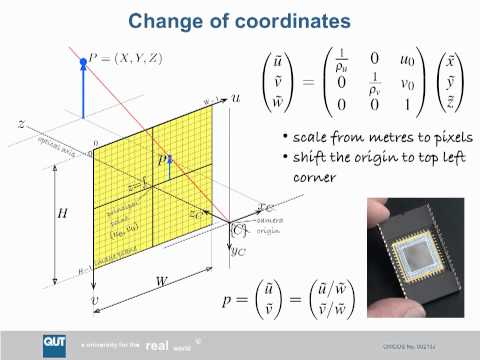
ENB339 lecture 9: Image geometry and planar homography
 0:51:12
0:51:12
3D Computer Vision | Lecture 5 (Part 2): Camera models and calibration
 0:00:23
0:00:23
i’m 2 days into college and i’m 3 lectures behind #shortsvideo #tiktok #skyyjade
 0:00:55
0:00:55
Supernanny lectures uninterested dad 🫣 #supernanny #jofrost #parenting #childcare #discipline
 0:50:59
0:50:59
CVFX Lecture 22: Facial and markerless motion capture
 0:05:19
0:05:19
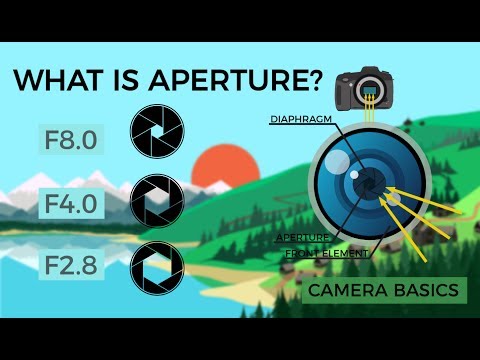
Camera Basics - Aperture
 0:12:28
0:12:28
Analysis II Lecture 12 Part 1 the tangent space
 0:37:21
0:37:21
PTZ Cameras for Lecture Capture
 0:34:31
0:34:31
3D Computer Vision | Lecture 5 (Part 3): Camera models and calibration
 0:54:24
0:54:24
3D Computer Vision | Lecture 6 (Part 1): Single view metrology
 0:01:00
0:01:00
Why are Countries Interested in the Middle East? #shorts #upsc #ias #middleeast
Комментарии