filmov
tv
Control Bootcamp: Linear Quadratic Gaussian (LQG)

Показать описание
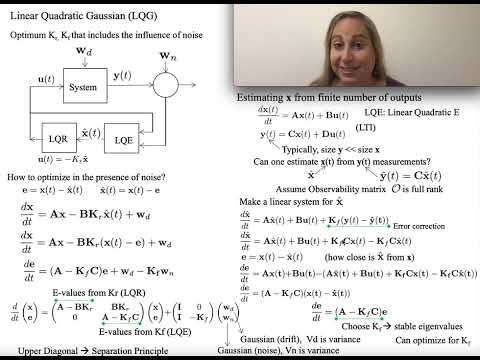
This lecture combines the optimal full-state feedback (e.g., LQR) with the optimal full-state estimator (e.g., LQE or Kalman Filter) to obtain the sensor-based linear quadratic Gaussian (LQG) controller.
These lectures follow Chapters 1 & 3 from:
Machine learning control, by Duriez, Brunton, & Noack
This video was produced at the University of Washington
These lectures follow Chapters 1 & 3 from:
Machine learning control, by Duriez, Brunton, & Noack
This video was produced at the University of Washington
 0:08:34
0:08:34
Control Bootcamp: Linear Quadratic Gaussian (LQG)
 0:08:25
0:08:25
Linear Quadratic Gaussian Controller
 1:19:24
1:19:24
Lecture 8 - Linear Quadratic Gaussian (LQG) Control : Advanced Control Systems 2
 0:13:04
0:13:04
Linear Quadratic Regulator (LQR) Control for the Inverted Pendulum on a Cart [Control Bootcamp]
 0:01:00
0:01:00
APRICOT: Testing LQG and LQR controller on a Boeing 747
 0:18:35
0:18:35
Linear Quadratic Gaussian Control
 1:11:58
1:11:58
Lecture 9 - Linear Quadratic Gaussian (LQG) Control (cont.) : Advanced Control Systems 2
 0:00:05
0:00:05
Stabilization of Rotary inverted pendulum using Linear–quadratic–Gaussian controller.
 0:17:24
0:17:24
What Is Linear Quadratic Regulator (LQR) Optimal Control? | State Space, Part 4
 0:12:48
0:12:48
Part-1. Linear Quadratic Gaussian
 0:06:30
0:06:30
ECE 463.31 LQG/LTR Control
 0:06:51
0:06:51
Linear-quadratic-Gaussian control
 0:09:39
0:09:39
ECE 463.25 LQG Control
 0:13:26
0:13:26
Control Bootcamp: LQG Example in Matlab
 0:00:24
0:00:24
LQG Control Results (without Observer, with Observer)
 1:00:19
1:00:19
TILOS Seminar: Non-convex Optimization for Linear Quadratic Gaussian (LQG) Control (2022-09-21)
 0:08:13
0:08:13
Control Bootcamp: Introduction to Robust Control
 0:06:11
0:06:11
The Kalman Filter [Control Bootcamp]
 0:00:22
0:00:22
LQG Controller Project
 0:00:09
0:00:09
Self Balancing Robot using Linear Quadratic Gaussian Controller (LQG)
 0:00:07
0:00:07
Balance using LQR controller
 0:03:53
0:03:53
Two Wheeled Autonomous Balanced Robot Based on Linear Quadratic Gaussian Control
 0:09:49
0:09:49
Effective LQE and starting LQG Control Systems
 0:15:46
0:15:46
Control course: Linear quadratic regulator (introduction)
Комментарии