filmov
tv
Vehicle Modeling Using Simulink
Показать описание
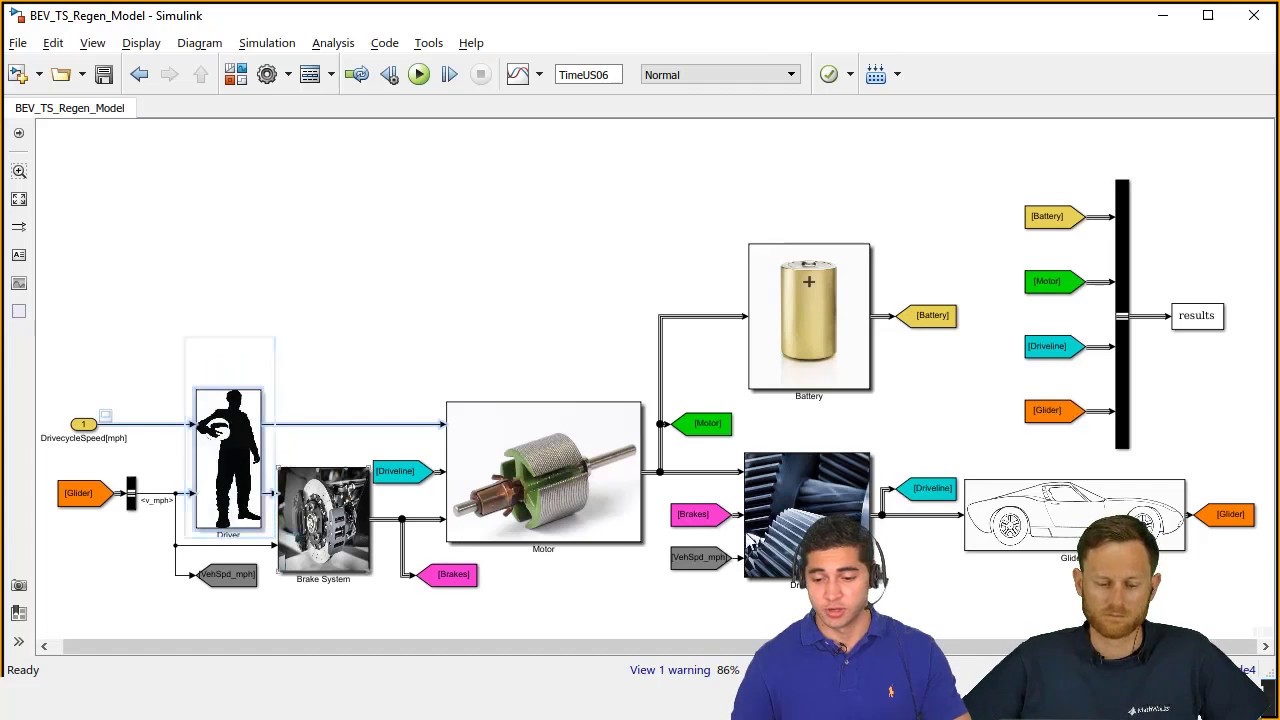
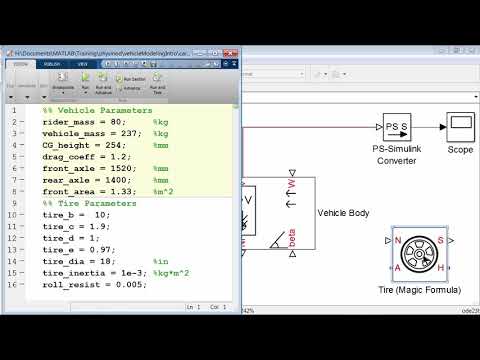
Join Ed Marquez and Christoph Hahn as they discuss Model-Based Design, Simulink® models and demos, and solvers. In the beginning of this video, you are introduced to Model-Based Design and equation-based modeling. Ed and Christoph then explain how to model vehicle dynamics and specific components using a power loss approach. While they offer a high-level overview, MATLAB and Simulink Racing Lounge provides you with an in-depth explanation of battery modeling if you’re interested in learning more. The demos shown in this video reinforce the concepts learned and explain how to implement such models in the Simulink canvas. Last but not least, Ed and Christoph touch on the question of solver choice briefly. You can find detailed information about solver choice in the documentation.
 0:30:42
0:30:42
Vehicle Modeling Using Simulink
 0:03:47
0:03:47
Modeling a Vehicle Powertrain - MATLAB and Simulink Video
 0:18:29
0:18:29
Vehicle Modeling Using Powertrain Blockset
 0:39:03
0:39:03
Physical Modeling Tutorial, Part 3: Introduction to Vehicle Modeling
 0:09:14
0:09:14
Simulating Longitudinal and Lateral Vehicle Dynamics
 0:38:53
0:38:53
Electric Vehicles Modeling using MATLAB Simulink
 0:22:00
0:22:00
Vehicle Modeling Using Simscape
 0:00:22
0:00:22
Car-like Robot simulation in Matlab Simulink
 0:22:47
0:22:47
Vehicle Modeling Using Simscape Multibody
 0:12:04
0:12:04
Matlab simulink model of a Quarter-Car model
 0:32:20
0:32:20
How to Model and Simulate Automotive Systems Using Powertrain Blockset
 0:30:27
0:30:27
Formula Student Vehicle Modeling Using Simscape Multibody
 0:04:55
0:04:55
Vehicle Dynamics Multibody Model using Simulink #SimulinkChallenge2022
 1:47:58
1:47:58
Vehicle Powertrain Modeling and Full Vehicle Simulation Using MATLAB and Simulink for Student Compet
 0:18:27
0:18:27
Simulink for Virtual Vehicle Development
 0:14:26
0:14:26
Design, Calculation and Simulation of Electric Vehicle on MATLAB Simulink
 0:17:31
0:17:31
Electric Vehicle Simulation in Simulink | @MATLABHelper Blog
 0:19:53
0:19:53
Simulink Beginners Tutorial 2 - Speed and Traction Control Design for a Car
 0:26:01
0:26:01
Radar System Modeling and Simulation for Automotive Advanced Driver Assistance Systems
 0:53:04
0:53:04
Vehicle Dynamics Modeling with Drive Cycle Source using Matlab/Simulink
 0:00:30
0:00:30
Half Car Vehicle Suspension using PID controller #Matlab #Simulink #Model
 0:00:33
0:00:33
Car Model in Simulink MATLAB | MatlabHelp.com
 0:00:16
0:00:16
ELECTRIC VEHICLE SIMULINK MODELLING USING MATLAB
 0:10:47
0:10:47
Vehicle Suspension System Modeling Using Simulink (Quarter Car)
Комментарии