filmov
tv
Tutorial: Convolution sum
Показать описание
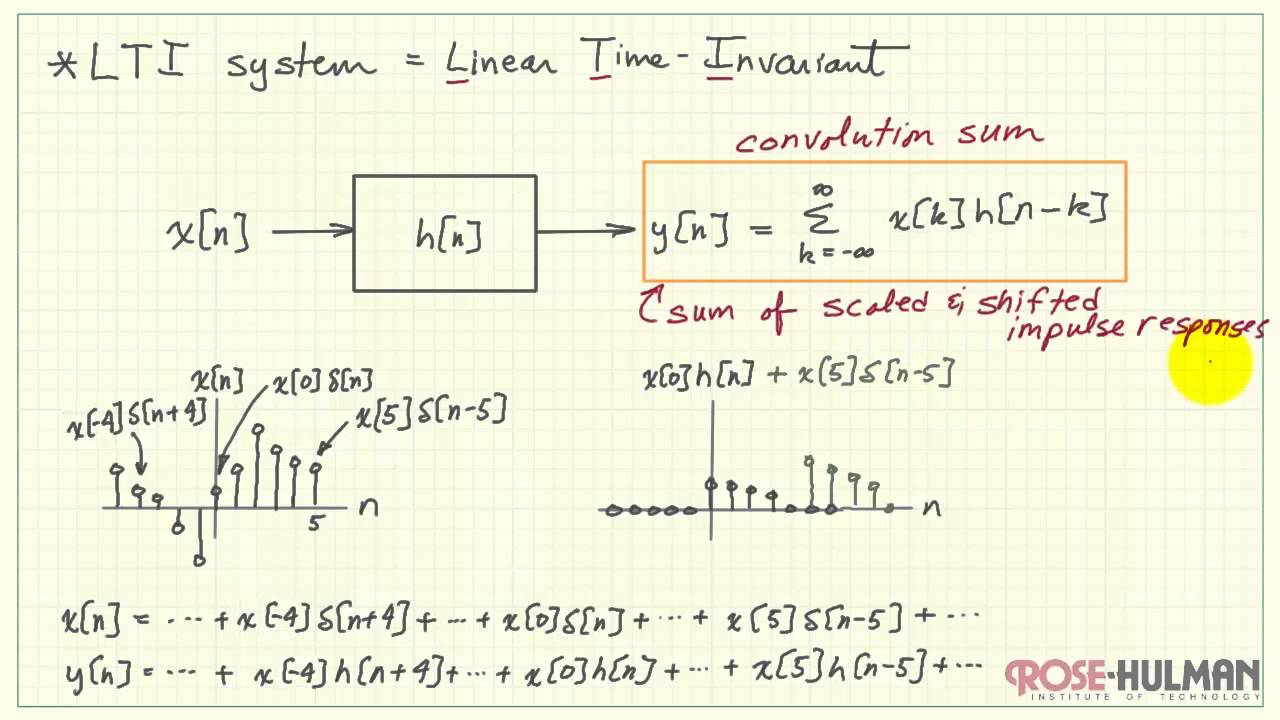
Learn about the discrete-time convolution sum of a linear time-invariant (LTI) system, and how to evaluate this sum to convolve two finite-length sequences.
CORRECTION: At 2:50, the graph heading on the right-hand stem plot should add "x[5]h[n-5]" ("h" instead of "delta").
CORRECTION: At 2:50, the graph heading on the right-hand stem plot should add "x[5]h[n-5]" ("h" instead of "delta").
 0:09:17
0:09:17
Tutorial: Convolution sum
 0:12:24
0:12:24
#110 Solved problems -2 on Convolution Sum || EC Academy
 0:10:10
0:10:10
Discrete Time Convolution Example
 0:07:53
0:07:53
Convolution Sum: Solving Example and Understanding the Solution
 0:07:49
0:07:49
Method to Find Discrete Convolution
 0:15:10
0:15:10
Discrete Time Convolution
 0:24:56
0:24:56
Convolution Sum - Properties - Graphical Method
 0:04:15
0:04:15
Convolution Sum Multiplication
 0:17:22
0:17:22
Convolution by Dr. Navneet Kaur
 0:13:03
0:13:03
Convolution Sum Part 1
 0:12:29
0:12:29
Convolution Sum- Tutorials (SS 01-05)
 0:08:10
0:08:10
derivation of the convolution sum
 0:22:33
0:22:33
Convolution sum of two discrete time step signals.
 0:07:40
0:07:40
DSP 11: convolution sum / table method method
 0:23:01
0:23:01
But what is a convolution?
 0:06:31
0:06:31
Discrete-time convolution sum and example
 0:16:58
0:16:58
#109 Solved problems -1 on Convolution Sum || EC Academy
 0:09:07
0:09:07
Discrete Time Convolution (Tabular Method)
 0:18:09
0:18:09
Convolution Sum Part 2
 0:16:26
0:16:26
Convolution Sum | Introduction and Example | 2.1
 0:07:14
0:07:14
Convolution Sum
 0:08:22
0:08:22
#106 Convolution Sum || EC Academy
 0:29:04
0:29:04
Chapter 02 Part 1: Impulse Response and Convolution for Discrete Time Systems
 0:06:28
0:06:28
Sum by Column Method to Calculate Discrete Convolution
Комментарии