filmov
tv
Develop Autonomous Algorithms using ROS

Показать описание
In this livestream, well will showcase how to build and deploy autonomous algorithms using ROS. Using examples, we will showcase how to interface with ROS networks using publishers and subscribers, build algorithms for mapping, planning and navigation and deploying algorithms as ROS nodes.
Learn more:
Resources for the robotics community:
Ronal George is an application engineer for robotics and autonomous systems at MathWorks. Prior to joining MathWorks in April 2019, Ronal worked as an inside sales engineer at SPX Transformer Solutions and as an electrical design engineer at WindLabs. Ronal has a master’s degree in electrical engineering from North Carolina State University. As a part of his master’s, Ronal worked with the Advanced Diagnosis, Automation and Control (ADAC) Laboratory to develop planning and localization algorithms for multiagent systems.
Jose Avendano is a robotics engineer from MathWorks specialized in robotics research and education. Other previous experience includes modeling, simulation, and algorithm development for robot manipulators, autonomous rendezvous and collaboration for zero-gravity navigation, and robust estimation and control of flexible vehicle structures.
Learn more:
Resources for the robotics community:
Ronal George is an application engineer for robotics and autonomous systems at MathWorks. Prior to joining MathWorks in April 2019, Ronal worked as an inside sales engineer at SPX Transformer Solutions and as an electrical design engineer at WindLabs. Ronal has a master’s degree in electrical engineering from North Carolina State University. As a part of his master’s, Ronal worked with the Advanced Diagnosis, Automation and Control (ADAC) Laboratory to develop planning and localization algorithms for multiagent systems.
Jose Avendano is a robotics engineer from MathWorks specialized in robotics research and education. Other previous experience includes modeling, simulation, and algorithm development for robot manipulators, autonomous rendezvous and collaboration for zero-gravity navigation, and robust estimation and control of flexible vehicle structures.
 0:57:36
0:57:36
Develop Autonomous Algorithms using ROS
 0:00:22
0:00:22
HBFS Line Follower - Next Generation of Robots
![[ROS Q&A] How](https://i.ytimg.com/vi/7twFp8n9L7s/hqdefault.jpg) 0:08:44
0:08:44
[ROS Q&A] How to test ROS algorithms using ROS Development Studio
 0:01:02
0:01:02
2D / 3D Dual SLAM Robot using ROS and LiDAR with Raspberry Pi
 0:06:36
0:06:36
What is ROS, When to use it, and Why ? - Robot Operating System Tutorial
 0:11:35
0:11:35
SLAM Robot Mapping - Computerphile
 0:06:22
0:06:22
Introduction to Path Planning in Robot Operating System (ROS)
 0:00:55
0:00:55
Top 3 ROS resources for beginners
 0:54:49
0:54:49
Writing Path Planning Algorithms in ROS - ROS1 | Sakshay Mahna | ROS Developers Day 2022
 0:00:44
0:00:44
A demo of agriculture robot. Robotic arm + Raspberry PI + Python + OpenCV.
 0:08:02
0:08:02
Autonomous navigation using ROS
 0:03:06
0:03:06
autonomous exploration, mapping, and planning using ROS
 0:06:22
0:06:22
Design and Deployment of an Automated Parking Valet on ROS and ROS2 Networks
 0:17:55
0:17:55
Path Planning with A* and RRT | Autonomous Navigation, Part 4
 0:24:31
0:24:31
MATLAB & ROS: part 1
 0:13:19
0:13:19
Create ROS Nodes for Custom SLAM (Simultaneous Localization and Mapping) Algorithms
 0:50:51
0:50:51
How to Train Your Team with ROS for Self-Driving Cars?
 0:13:26
0:13:26
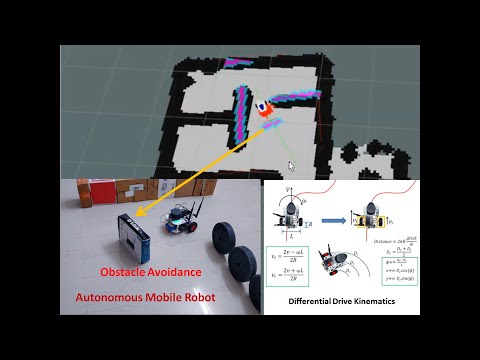
Autonomous Navigation Mobile Robot using ROS | Jetson Nano | RPLidar | Differential Drive Kinematics
 0:03:19
0:03:19
Deep Learning Cars
 0:01:13
0:01:13
ROS - Autonomous Navigation - Navigation Stack & Computer Vision
 0:35:08
0:35:08
ROS and ROS 2 Using MATLAB and Simulink
 0:01:03
0:01:03
Autonomous navigation of an iRobot Create using ROS
 0:03:37
0:03:37
JetAuto ROS Robot Car Powered by Jetson Nano with Lidar Depth Camera Touch Screen
 0:49:30
0:49:30
Autonomous Navigation of Turtlebot Using ROS | ROS Tutorials for Beginners | Lesson 9
Комментарии