filmov
tv
Robot Singularities & how to find them | Robotics 101
Показать описание
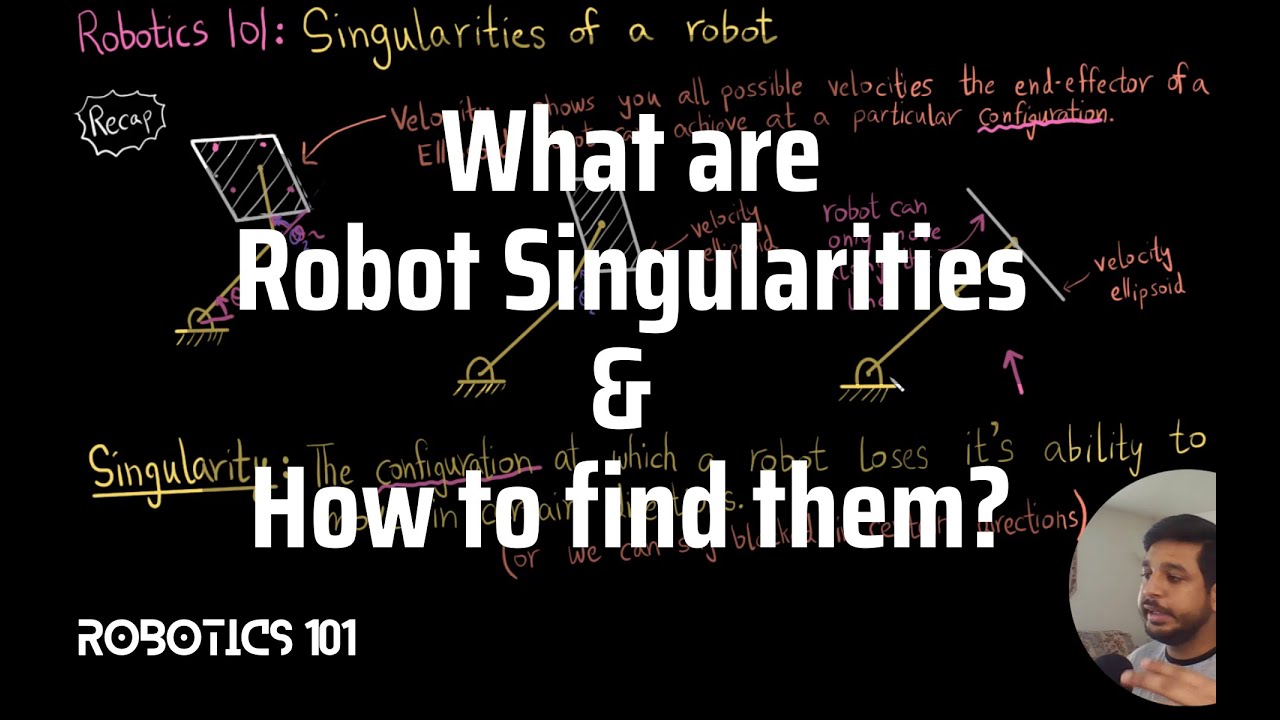
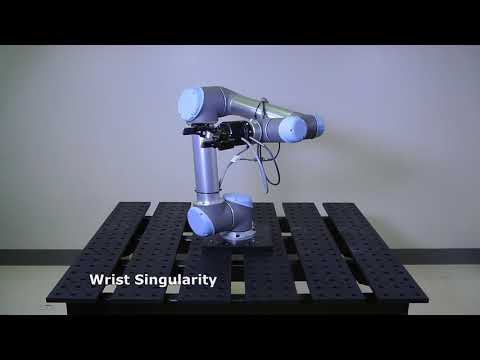
This video covers one of the fundamental concepts in robotics- the singularity of robots. It is where the robot loses its ability to move in one or more directions.
Generally, when designing robots, the designer needs to be aware of what the robot can and cannot do. If the robot is made to go from point A to point B where it encounters a singularity while doing so, we are going to have erratic results (the actuators might saturate, lots of errors, etc).
00:00 - Velocity ellipsoid recap
02:30 - Definition of Singularity
03:30 - Finding out where the singularities lie
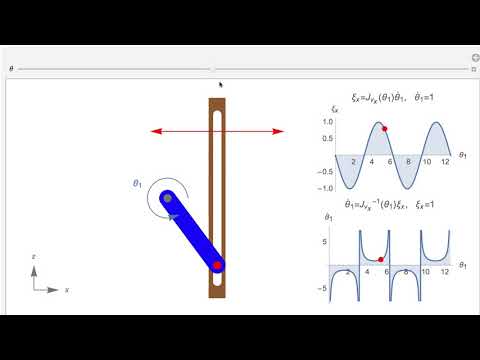
08:10 - Let's do an example
09:56 - Another example to really jam in the concept
------
This video is part of the Robotics 101 tutorial series which covers kinematics and modeling of 2D & 3D robots.
This tutorial lesson series starts from the basics of robotics (assuming no prior knowledge) and gradually builds on in bite-sized videos of 10 minutes or less. By following along, you will soon become extremely good in the kinematics and modeling aspects of robots. And these will help you to design and build robots.
Here's what we will cover in this video series:
1. Co-ordinate Transformation for 2D & 3D robots
2. Homogeneous Transformations for 2D & 3D robots
3. Forward Kinematics
4. Inverse Kinematics
5. Robotic wrists (end-effector)
6. End-effector Velocities and Jacobians
7. Singularities of robots
8. Gimbal Locks
9. Forces & Torques
I will be uploading 1 video per week. If you find these helpful, don't forget to share and subscribe!
_____________________________
👉 Link to the Robotics 101 playlist
Robotics 101 - Robotics full course for beginners - Kinematics and Modeling
#velocitykinematics#jacobian#roboticsforbeginners #roboticsTutorials #robotics #learnrobotics
Generally, when designing robots, the designer needs to be aware of what the robot can and cannot do. If the robot is made to go from point A to point B where it encounters a singularity while doing so, we are going to have erratic results (the actuators might saturate, lots of errors, etc).
00:00 - Velocity ellipsoid recap
02:30 - Definition of Singularity
03:30 - Finding out where the singularities lie
08:10 - Let's do an example
09:56 - Another example to really jam in the concept
------
This video is part of the Robotics 101 tutorial series which covers kinematics and modeling of 2D & 3D robots.
This tutorial lesson series starts from the basics of robotics (assuming no prior knowledge) and gradually builds on in bite-sized videos of 10 minutes or less. By following along, you will soon become extremely good in the kinematics and modeling aspects of robots. And these will help you to design and build robots.
Here's what we will cover in this video series:
1. Co-ordinate Transformation for 2D & 3D robots
2. Homogeneous Transformations for 2D & 3D robots
3. Forward Kinematics
4. Inverse Kinematics
5. Robotic wrists (end-effector)
6. End-effector Velocities and Jacobians
7. Singularities of robots
8. Gimbal Locks
9. Forces & Torques
I will be uploading 1 video per week. If you find these helpful, don't forget to share and subscribe!
_____________________________
👉 Link to the Robotics 101 playlist
Robotics 101 - Robotics full course for beginners - Kinematics and Modeling
#velocitykinematics#jacobian#roboticsforbeginners #roboticsTutorials #robotics #learnrobotics
 0:01:08
0:01:08
What are robot singularities?
 0:03:34
0:03:34
Types of singularities and how to avoid them: Quick guide with ABB's single-arm YuMi cobot.
 0:01:31
0:01:31
Robot singularity explained
 0:11:09
0:11:09
Robot Singularities & how to find them | Robotics 101
 0:01:32
0:01:32
What are the singularities of a typical collaborative robot (cobot)
 0:06:37
0:06:37
Modern Robotics, Chapter 5.3: Singularities
 0:00:23
0:00:23
Crossing singularities with a six-axis industrial robot arm
 0:05:21
0:05:21
Robot Singularities
 0:01:43
0:01:43
Ben Goertzel on the Introduction of AGI #decentralizedai #ai #artificialintelligence #agi
 0:00:43
0:00:43
Wrist Singularity Avoidance
 0:00:58
0:00:58
Robot Singularities | Getting started with Lensmaster
 0:02:37
0:02:37
Video Showing the Singularities of an ABB Robot, 15/12/2015
 0:20:21
0:20:21
Jacobian Matrix and Singularities | Robotics | Introduction | Part 1
 0:01:38
0:01:38
Universal Robots Singularities: Visualisation in Polyscope
 0:46:55
0:46:55
Optimizing Robot Paths (by Coping with Robot Singularities)
 0:01:21
0:01:21
Singularity avoidance in human-robot collaboration with performance constraints
 0:01:57
0:01:57
Singularity behavior during kinematic control of a 6-dof robot arm
 0:00:15
0:00:15
Robot Singularity 
 0:19:12
0:19:12
Intro2Robotics Lecture 14a: Manipulator Singularities
 0:13:49
0:13:49
Robot Singularities (1 of 3)
 0:11:45
0:11:45
Singularities Avoidance - Module 10 Chapter 09 - RoboDK Pro Training
 0:00:40
0:00:40
Singularity
 1:39:20
1:39:20
Robotics - Kinematic singularities and Analysis of redundancy (2023)
 0:03:48
0:03:48
RhinoRobot 3: How to check singularity, collisions and limits
Комментарии